Thinking out loud
Where we share the insights, questions, and observations that shape our approach.
What is automotive software and why does it matter?
Connected Car , Software Development and Autonomous Driving are the three most repeated words in the automotive industry. It’s hard not to notice that all three are basically different use cases heavily dependent on different kinds of software: cloud, AI, edge computing, or internal applications. Analysts, investors, management, and even regular employees of OEMs seem to believe and agree that software is the future of the automotive industry. But why?
Automotive software - how did we get there?
To understand the origins of this trend, let’s briefly look at the last 20 years of automotive history. On the market, where 99% of vehicles were based on combustion engines, a new entrant appeared. Tesla Motors Inc. A company with no background in building cars, named to pay tribute to the well-known electrical engineer, Nikola Tesla. A year later, famous entrepreneur, Elon Musk, decided to invest in this dream of building electric vehicles for the masses.
Fast forward to 2012 and we have the world premiere of the Tesla Model S. The Electric Vehicle, being the biggest disruption in the automotive industry in years, immediately receiving several automotive awards, including Car of The Year. Designed and developed by a company with 10 years of experience on the market and literally, a single vehicle developed earlier (the original Tesla Roadster). This showed that there is a big, unoccupied market for electric vehicles.
Just a year later, the Tesla Autopilot was introduced, and the whole world joined the hype for autonomous driving.
Why did Tesla get so popular?
It was not just because the market desperately needed an electric vehicle. Since the beginning, Tesla has been designing its cars to be software-centric. Big on-board CPUs from Nvidia support, not just Autopilot but also a multitude of applications and services available in the largest (at the time at least) central screen of a road car.
And the software has been updated very often using Over-The-Air upgrades, giving the customers the feeling that the software was always fresh and the producer quickly reacted to feedback with new changes. Effectively, making the software a major selling point.
Electrification
Apart from the software-defined vehicle focus, electrification started as a solution to reduce the CO2 footprint of the industry. Both BEV and PHEV vehicles development was caused partially by new legislation and sustainability requirements, and partially of course by the success of Tesla. The EVs offering is increasing year by year, and most of the brands announced the potential timeline of reducing the combustion engines offering to 0 models.
The industry today
It seems like all of the large OEMs treated Tesla as their very own R&D department and allowed the company to conduct the world’s biggest ever market study. Tesla was able to prove that people actually care for the CO2 emission and want to drive electric cars and also showed that software in a vehicle may be more appealing to end-users than the sound of V8.
On the other hand, we compared Tesla to an R&D department because their cars are not always built with top quality and software sometimes have glitches – all in all, it’s a tremendous idea, but not an ideal car. VW Group, Toyota, or Stellantis could never afford to make such mistakes.
Software defined-vehicles became a real future trend, not when Tesla S was first shown to the world. That happened when all of the world’s top OEMs decided that enough is enough, the experiment was over and the time to “productionize” Tesla’s “concept” had come.
And here we are today, a few days after Stellantis Software Day, an investor meeting purely focused on the Software-Defined Vehicles and their new platform, STLA (pronounced `Stella`). A few months after Mercedes-Benz announced that they are hiring developers to work on their own Operating System, MB.OS, as part of a greater “Digital First” brand strategy. A year after the CARIAD by Volkswagen Group was fully defined to provide unified software platforms for all vehicles in the group, called ODP (One Digital Platform) or VW.OS and VW.AC (VW Automotive Cloud).
Everyone is fully committed. But what exactly is the automotive industry committed to? Let’s dissect the latest event, Stellantis Software Day, to see the core topics they want to focus on in the next few years.
- Disconnecting hardware and software lifecycle.
- Broadening the scope of software in the vehicle.
- OTA software updates for adding new features.
- Using software to create a unique offering for all brands in the group.
- Connected Car data monetization .
- Software to support EV and sustainability.
#SWDAY21Stellantis | Carlos Tavares, CEO: "We are transforming #Stellantis into a #tech #mobility company. We owe it to our customers. We owe it to our Brands. We owe it to the principle on which #Stellantis was founded". pic.twitter.com/iMYHSLpMwL — Stellantis (@Stellantis) December 7, 2021
Those are predicted to generate ~€20B in incremental annual revenues by 2030. That, of course, partially answers the “why?” question, but is there more to it?
Coming back to why
If we summarize the situation, we see that electrification and disruption forced the industry to change. The side effect of electrification is making the previous key differentiator - powertrain - much less important. With electric vehicles, the engines are not the key. Most of them are very similar and technology focuses more on batteries. This makes the different models similar, especially in terms of acceleration and horsepower.
So, where is the differentiator? Where do companies look for unique selling points for their brands, and how do they separate the offering of different models when the platform is almost exactly the same?
https://twitter.com/Herbert_Diess/status/1469218343068614657
As you might have already guessed - that is the software. Of course, it’s not just electrification, the other key aspect is also digitalization of our lives, but the disruption already happened and the industry tries to follow.
The people fueling the future of automotive software
Certainly, when everyone decides at the same time to do a similar shift, it can get complicated rapidly. From the resourcing perspective, in the market with such a shortage of skilled software engineers, when everyone tries to quickly build their software competencies, it cannot come without problems. Hiring an experienced software developer is hard, and it gets harder if a company is fully focused on vehicle manufacturing, with a limited budget for IT and IT recruitment departments. The problems with building teams can result in delays in project start or extending their timeline.
This is where partnerships with companies like Grape Up come into play. Partnering with a software development company with strong experience in the automotive industry can help mitigate those issues - having skilled engineers available to help frame the project, architect, develop, and productionize significantly reduces the risk of shifting towards software development, and in the meantime also allows to train internal staff by working together, hands-on, on the actual projects.
The end
We are an endangered species, you and me. We fans of speed, we devotees of power, we lovers of performance and beauty, and mechanical soul. We dare not speak of cams or cranks or double wishbones. We fear for our love of roaring V8s and the smell of burnt rubber. We're told to think of the economy, the environment, and not excitement and enjoyment. In an age of hybrid-this and automatic-that, we are the odd ones out. Yet there is hope. There is a haven. A place that celebrates speed, grip, gears, and fun. And it's all here for you to explore.
Jeremy Clarkson


Beyond Spotify and Netflix- the future of in-vehicle infotainment systems in connected cars
It cost a staggering $200 for that time. The antenna took up almost the entire roof of the car, the batteries barely fit under the front seat, and the huge speakers had to be fixed to the back of the seat backrest. The year was 1922, just over 20 years after the launch of the first mass-produced Oldsmobile Curved Dash car. Entertainment had just made its entrance into the car industry - Chevrolet introduced the first car radio. From then on it only got more exciting.
Nowadays, 100 years on from that event, we can no longer envisage a car without radio, music, or news. In fact, we can no longer imagine a car without entertainment in the broadest sense of the word. Because the radio - at least in its traditional form - is slowly becoming obsolete. It's being replaced by a "personal radio station" created by the driver - streaming music, favorite podcasts, audiobooks, and even video content.
Although we are still a far cry from the catchy phrase "a smartphone on wheels" , first uttered in 2011 by Akio Toyoda, the automotive industry is indeed heading in this direction. Cars are ceasing to be vehicles designed to take us from A to B. Like any other device connected to the Internet, they are becoming a gate to new worlds of entertainment, shopping, learning, or gaming.
When finishing shopping or listening to an audiobook on one device, we want to seamlessly continue the activity on a laptop or desktop computer. Whether we like it or not, the car is becoming another medium that will allow us to stay virtually connected all the time.
Akio Toyoda was wrong. A car is much more than a "smartphone" on wheels!
A potentially larger screen than a smartphone (not only the touchscreen in-vehicle infotainment system panel, but the windscreen too, which can also be used to display content), at least 4 seats that can be independently paired with the in-car entertainment system, and, ironically, much more mobility than mobile devices.
As we look at the development of V2X (vehicle-to-everything) technology, which will turn vehicles into the Internet of Things devices, the opportunities that lie ahead for the automotive industry in the entertainment field are hard to estimate.
One thing is certain. This process cannot be stopped. Every company in the automotive industry must be aware of the upcoming changes.
According to IHS Markit data, in 2014 only 53% of cars in the USA had a dashboard touch screen, while today this percentage has already reached 82%. These types of solutions can bring automotive companies entirely new revenue streams, and most importantly they will be less dependent on vehicle production cycles and with much higher margins.
The in-vehicle infotainment system market is estimated to be worth $78.9 billion by 2025. [Allied Market Research].
Quo Vadis in-vehicle infotainment systems?
In-vehicle voice assistants for infotainment control
Siri, Alexa, or Google Now are names that have become part of the consumer market and make life easier for most of us, allowing us to make phone calls, send messages or manage our own calendars. While sending voice commands to our phone or the speaker in our home or office is nothing new, communicating with our own car is still some kind of novelty.
And it is here while driving when we need to focus on the road and have our hands free, that voice technology can be of the most benefit and make driving more efficient and smooth. And of course, more fun.
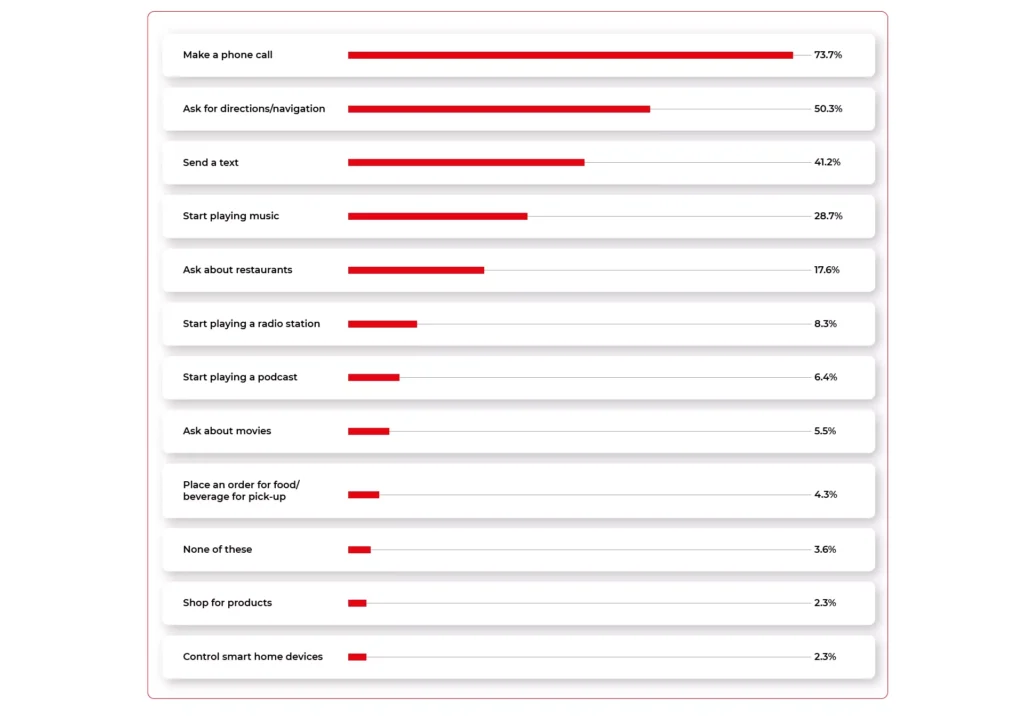
Navigant Research (Guidehouse) predicts that by 2028, 90% of vehicles will be equipped with a voice assistant. Already today - looking at Voicebot.ai data - a large proportion of commands given by drivers are entertainment-related. Playing music, listening to podcasts, finding out about movies, ordering food, or making purchases directly from behind the wheel is becoming increasingly popular among drivers with enhanced IVI systems.
The main players in this section are certainly the manufacturers already known for their other platforms, namely Google and Apple, which are integrating their Android Auto and Carplay technologies in partnership with major OEMs. Hot on its heels is Amazon, which has not only begun collaborating to bring Alexa into Toyota, Ford, and BMW vehicles but also released an Amazon Echo device that any driver can install in their car themselves (as long as it meets the manufacturer's technical requirements).
Vehicle manufacturers, however, are no longer just waiting for the offers of the largest players in this market, but are developing their systems or working with smaller business partners to help them develop such solutions.
Korea's Hyundai has entered into an operation with Saltlux, a company specializing in semantic networks. Honda, Kia Motors, and Daimler are working with the SoundHound start-up. And Volkswagen has invested $180 million in the Chinese start-up Mobvoi.
Gesture-recognition
Voice command in the car is a trend that will continue to grow every year. Yet, there are situations in which gestures are much better than voice commands - for example when you are on a call or have a cold and don't want to strain your throat. Gestures are universal for every driver, while voice assistant applications are often still hampered by technological limitations, for example, due to the variety of accents or the system's adaptation to the driver's language.
As the system recognizes a gesture made with the palm of your hand, fingers, or even your head, you can stay focused on your driving and at the same time activate a specific function when you cannot use your voice command. Scrolling through songs on the radio, raising or lowering the temperature in the car, launching a text message application - all these actions can be configured using gestures. Instead of clicking and scrolling through a touchpad, which always entails taking your eyes off the road, gestures will allow you to boost safety and easily manage the entire system.
Virtual reality & Augmented reality
While currently the introduction of virtual reality in vehicles only makes sense for passengers who do not need to focus on driving, augmented reality technologies are already being successfully implemented in vehicles. Unlike VR, augmented reality does not distract drivers from reality and allows them to concentrate on driving. And they can even increase safety.
Although today this type of technology can only be found in the most innovative and prestigious IVI systems (one of the first cars in which this technology was used was Mercedes-Benz GLE 2020), we should expect this type of solution to develop in the near future, as it brings a whole new quality to in-car entertainment.
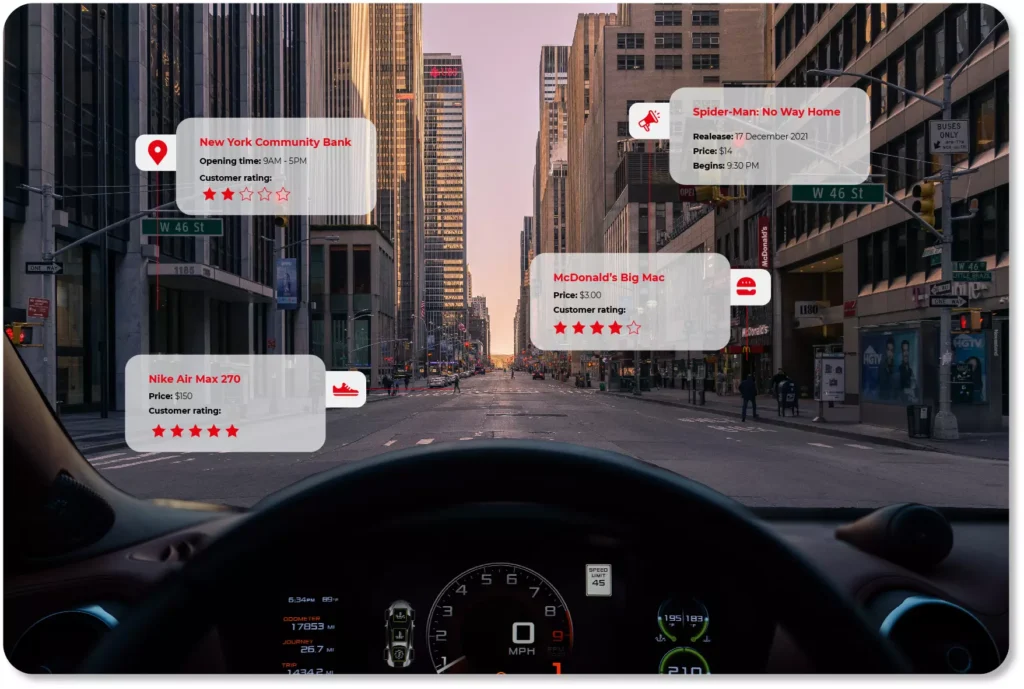
Their direct equivalent to the automotive field is the heads-up display system, which is an additional head-up display integrated into the vehicle's windscreen in addition to the IVI control panel. This screen can be used to display destination-related information, traffic warnings, or information about other vehicles on the road (so-called intelligent terrain mapping).
In the near future, these technologies may also be applied in entertainment itself - for instance in the form of augmented marketing. The windscreen will then display interesting offers and discounts from the restaurants, shops or shopping malls we have just passed. The displayed images will of course adapt to our driving speed, and we can decide for ourselves what kind of messages we wish to see.
On-demand in-car services
In-vehicle infotainment systems are the point of contact between different parties: customers, internet providers, companies producing vehicles, making entertainment, or electronic equipment (e.g. smartphones).
In most cases, drivers already have their favorite apps (Google and Apple being in the lead, of course) and use their favorite streaming services. Competing with platforms like Spotify, Netflix, Pandora or Slacker may not necessarily be the best strategy for automotive companies. It is much better to make use of the recognisability of brands that provide entertainment content and, based on this, extend it with a unique offer for their own clients. Opening up to partnerships with third-party platforms is the best way to address customer needs and create a stream of data that can be monetized .
One of the interesting market examples of this type are the efforts of the GM concern, which has created its own car application in the form of a marketplace, from which the driver can make purchases at Starbucks or Dunkin' Donuts, pay for the fuel at selected petrol stations, and book a hotel or a table at a restaurant.
We should expect that the trend of shopping straight from the car and making the most of the time we have on our commute to/from work while being stuck in traffic jams will not be limited to listening to music and podcasts only. With the development of the Internet of Things, drivers will also be able to control other devices within their "smart" network from their vehicles.
Samsung is already creating solutions that allow the driver to look into their own fridge and decide whether they need to go shopping, turn up the thermostat to prepare the perfect temperature for the return home, activate the alarm when going on holiday, or open the gate automatically.
Rear seat entertainment
Most modern IVI systems are not just an integrated head-unit, i.e. a touch panel on the vehicle dashboard for the driver, but more and more often, interactive panels dedicated to the passengers. These offer practically endless opportunities for entertainment. And we don't just mean the extensive range of streaming video services that can be subscribed to in the vehicle.
After all, the interactivity of the screens makes it possible to implement various applications and gamification elements in the car. These can take the form of quizzes, common picture drawing, shopping via third-party applications, or even karaoke singing, which can also engage the driver.
But what if the sound or type of music doesn't suit the driver, who wants to concentrate on driving? There are already solutions that direct the sound from different areas of the vehicle so that each passenger can listen to different music without wearing headphones.
This is how, for example, the Separated Sound Zone (SSZ) works in KIA cars. Based on multiple loudspeakers and the physical wave acoustics principles, the sounds do not overlap but instead reach their intended audience. Even if powerful beats dominate in the back seat, you can still relax while listening to calmer music in the driver's seat.
In-vehicle infotainment enters a new era
In-car entertainment has a long history. Ever since mobile devices became part of our lives, it is nothing new to connect a smartphone to a Bluetooth radio or for passengers to watch videos on their own smartphones/tablets. The only difference was that, until recently, in-vehicle infotainment was just an accessory, an element that makes a difference and highlights a brand. Today it is a factor on which customers often rely when buying a new vehicle.
In-vehicle infotainment is increasingly rarely limited to a touch screen panel on the dashboard. Right before our eyes, it is growing to be omnipresent and taking precedence over other vehicle functions. Brands that miss this moment and, like Blockbuster in the video content market or Nokia in the mobile market, may find themselves in a completely new reality. A reality in which totally different companies will be on top of the bunch.
Focus on the driver - data monetization at software-defined vehicle cannot exist without understanding customer needs
When talking about data monetization in the automotive industry, we tend to focus on technology, safety, sensors, or cloud solutions. However, all these elements fade when confronted with the ultimate element - the driver of the vehicle. Without taking into account their needs and expectations, there can be no question of generating revenue. Any vehicle data monetization strategy must be mindful of this.
We can fine-tune the system, we can find exceptional partners to implement the software in the vehicle, but without a deep understanding of the vehicle user, no one will benefit from the solutions developed. Our organization will put a considerable amount of effort into building the team and implementing the technology, but the new vehicle features will not be used by the driver.
For this to happen, we need two factors: a value proposition of the brand- which explains clearly and transparently what the user will get out of it, and a coherent action strategy based on a market-back methodology that stems from specific market needs and allow us to develop services that are desired by the customer.
What benefits do customers most often look for in a software-defined vehicle?
Remember that just because people want to use a service, it doesn't mean that they will pay for it. What matters here is not just the benefit, but also the way it is presented, the user experience, and the pricing model. Only the combination of all these elements determines the success of the service. First of all, it is worth focusing on the benefits themselves and only then selecting the right technology to match them.
What are users willing to actually pay for and what are they willing to share only? Many studies indicate that the main factor motivating consumers to share data is gamification and rivalry - this aspect has not changed for years, as we can see for example in social media or e.g. "free" applications, which from time to time appear on the market, gather millions of interested users and vanish in no time. However, when it comes to paying for such "services", users are not so willing to use them.
In vehicles, it looks slightly different. Capgemini's research shows that the connected car services that are most popular with consumers are those related to the "core" functionality of vehicles, such as:
- safety,
- driving comfort,
- time saving
- reduction of vehicle operating costs.
Among them, however, the services that are most willingly paid for are:
- hazard warning,
- collision warning,
- theft detection systems / vehicle finder.

Of course, just because entertainment or gamification isn't on the list doesn't mean that automotive companies should avoid them. It's also a way to distinguish and find their own individual voice that corresponds to the broad brand strategy and allows them to stand out in the market. It's about the way they are served, presented to the consumer, and showing that they can actually derive real benefit from them.
It also works the opposite way. Simply creating a "hazard warning" service in a connected car does not immediately guarantee success. It still needs to be packaged properly, run smoothly, and be provided with a payment model that suits the consumer.
Examples of customized connected car services
In-vehicle ads based on navigation and user experience
Is it possible that a driver will like the ads that will be displayed in the car? If we adopt the message to their needs and preferences, in all likelihood, it is. For example, if we often go to McDonald’s, the navigation system can mark such places on our route. We have our favorite clothing brand, right? We will certainly react differently to a sale offer in a shopping mall we just happen to be driving past. The context of shopping and the consumer’s needs are decisive, and the software-defined vehicle is perfectly suited to ensuring that the advertising message is 100% tailored to the driver.
Contextual payments
Removing barriers to shopping and being able to buy everything everywhere is a popular trend in modern commerce. In a vehicle where the driver is focused on the road and has their hands full, such a service makes even more sense. With the development of voice assistants, drivers will be able to pay this way not only for fuel or tolls but also for purchases beyond typical vehicle-related payments. Voice shopping on the way back home from work, instead of looking for a parking space in front of the mall and returning in traffic jams in the evening? Why not?
Sharing information about driver behaviour
Sharing data about the way we drive may not appeal to everyone. But if in return for sharing this information, a company gives us a huge discount on our car insurance or a super attractive leasing offer, then things may take a totally different turn. In cooperation with an insurance company or a bank, such services become a specific bargaining chip the OEM can play with when dealing with the driver.
Manufacturer's connected car applications
Saving money on car maintenance and taking care of the overall condition of the car is a benefit that most drivers will appreciate. A practical and thoughtful manufacturer app that warns of potential breakdowns, component replacements, or servicing will allow the user to enjoy a well-functioning vehicle for longer and sell it at a higher profit. In this way, the OEM gets the driver used to have the vehicle repaired at an authorized service center, and the user, due to the loyalty shown to the brand, can expect future discounts and lucrative offers.
Practical use of telemetry
Sharing telemetry data may seem profitable only to OEMs - after all, as they draw better conclusions based on the collected information and save on R&D processes. However, it is important for companies to make vehicle users aware of the benefits of such services, as well. After all, driving style data can be used to suggest solutions that improve road safety, work on fuel efficiency or reduce overall vehicle operating costs. In each of these cases, the winner is the driver. Example? When a vehicle frequently skids and triggers the ESP/TC system, the system can suggest that the driver should get better tyres (by a specific brand, of course).
Unlocking extra features on the subscription model
Paying for heated seats, just to use them for three months a year, may not be worthwhile for everyone. Well-known to us from streaming portals, the subscription model definitely meets the users’ needs. The customers themselves choose which functionalities they want to pay for and over what period of time. The OEM only has to take care of the right vehicle software that will enable that. And, of course, be careful not to alienate those customers who see this as "yet another" way to squeeze additional payments out of them. That’s how manufacturers can provide both functionalities directly related to the vehicle itself - e.g. better lights or engine boost - as well as those associated with in-car entertainment providers such as Spotify or Apple CarPlay.
What can be done to make the user more eager to pay for data monetization services?
A well-thought-out user experience is essential
In today's digital world, UX and mobile-friendly approaches decide whether a service is viable. If the product is presented in an unclear and incomprehensible way, and it is difficult for the user to find the desired options - they will not use it. The size and color of buttons, the messages displayed, the stability of the application - all of the above is of paramount importance and determine the popularity of the product. Keeping in mind the latest trends, mapping the market, and adapting to consumer trends is necessary to offer the vehicle user service of the quality known to them from e-commerce or their own AppStore.
UX itself is not only a practical tool that helps better track consumer behavior and how they use the service, but also a constant theme to promote and boost brand interest. Does Apple really need to upgrade iOS every year and does Instagram have to offer users a new feed layout every quarter? The answer is obvious. It's simply profitable for the brand.
Start with anonymized data
When creating a strategy for in-vehicle data monetization efforts, it's a good idea to start by developing services that don't require the sharing of personal data. A lower "pain threshold" will make it quicker for the user to learn the benefits of the system and how convenient or useful the service can be. Thus, it will be easier to convince people to use products that require more openness to data sharing. And this may be the next step in the implementation of technological solutions.
Focus on heavy-vehicle users
People who spend most of their day in the car or drive long and demanding routes happily embrace any technical innovations designed to make driving easier and safer for them. It is this group that should be targeted at the beginning of developing your own data monetization model.
Minimizing risks and accurately selecting the group will not solve all challenges, but it will increase the chance of success and help gain a new, loyal group of consumers who will help transfer the technology to other users.
Last, but not least: a flexible payment model
Convenience should accompany the user at every stage of the use of a new service. Not only when it is most beneficial to the user, but also when it is easiest for the user to give it up: whilst paying for the next billing period.
It is worth taking care of the flexibility of the payment model (e.g. one-off payment, freemium model, annual or monthly settlement), adjusting it to the user's needs and not hindering payments.
The smoother and more tailored to the user's needs the whole process of interacting with the service is - from understanding the need to using it to making payments - the greater the chance that the stream of data flowing from a given vehicle will not dry up after a short period of use (read: being frustrated using an underdeveloped product for the first time).
Let's remember that data monetization can succeed provided that it really understands the user, is fair and transparent to them and focuses on user experience. If we didn't have time to get to know the customer's needs, why should they waste their time on services they don't understand and don't need?
How to monetize vehicle data thanks to in-car technologies - what’s inside a Software-Defined Vehicle - Part 2
The collection of data and its subsequent monetization wouldn’t be possible without the ‘’attachment points" in the form of technologies already used in vehicles and controlled parts and systems. It's also common knowledge that car data monetization is based on three main sets of factors, covering quite different areas. These are automotive technologies, infrastructure technologies, and back-end processes. In this article, we are going to reverse-engineer in-car technologies.
There is no harvest without seeds. In relation to vehicles, these "seeds" are all the elements and systems that make data collection possible at all.
The proper design is the key when we talk about the effective use of information from the vehicle and from the users directly. Let's have a closer look at these crucial technologies.
8 technologies necessary to retrieve data from a vehicle
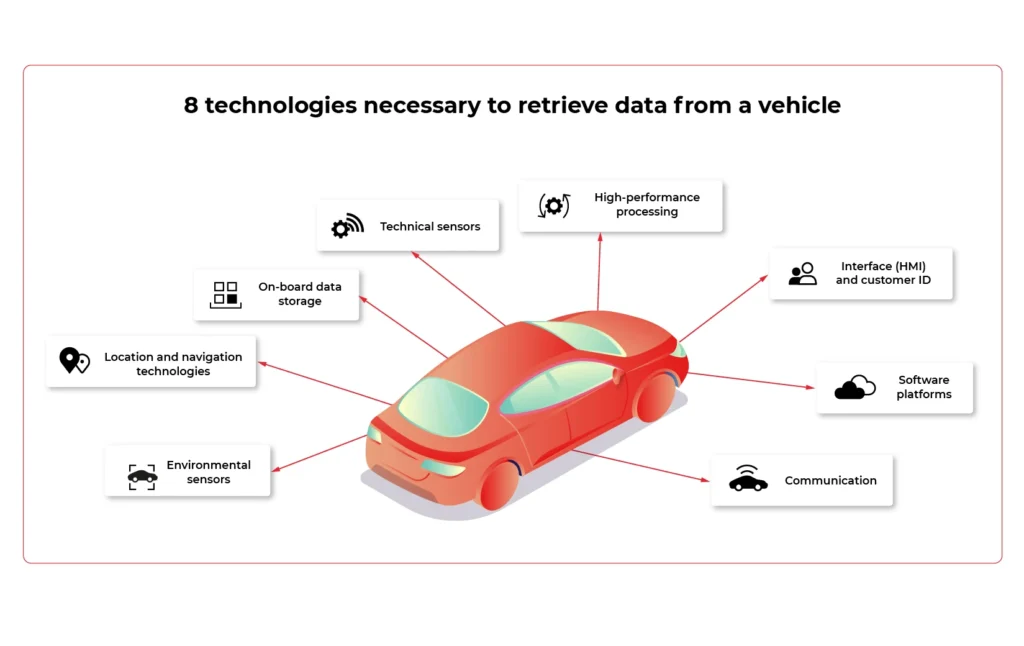
1. Technical sensors
For OEMs and suppliers , sensors are the foundation on which they can build knowledge about the vehicle's performance and possible breakdowns. Due to that, they are able to see how their products endure the operation.
With these resources, it is much easier to determine the cause of a particular fault. The biggest challenge? The type of setting and frequency of data collection and integration of results into R&D processes. These issues are yet to be discussed.
2. High-performance processing
Real-time processing and communication are pivotal in unlocking the data potential in the vehicle.
However, it is necessary to define, from the very outset, which specific processing elements are to take place in the vehicle and which in the cloud. Whether the hardware is upgradeable is also an important variable.
3. Interface (HMI) and customer ID
HMI is a bridge between a human and a machine. Any technology, tools, and devices allowing human beings to "communicate" with vehicles - request the operation, change the setting or read for example the current status of the engine.
User experience is the key. Making sure the vehicle operations are as intuitive as possible is the end goal of every interior and UI designer. Adding augmented reality, advanced HUD, gesture operations, or fancy ambient lights makes the driver feel at home, capable of quickly changing the vehicle settings, and always aware of the current situation and hazards.
4. Software platforms
They support various vehicle applications and high-speed data transmission protocols. In the context of monetization, two aspects are of paramount importance: the reliability of the over-the-air software updates and for which of what consumers will be able to pay.
5. Communication
The connection between the vehicle, sensors, internet, and onboard devices is essential. Network gateways include Wi-Fi, Bluetooth, RFID, as well as a high-speed 4G / 5G modem gateway. The latter is the greatest challenge.
The problem that needs to be dealt with is mainly the stability and cost of the aforementioned connection. As the vehicle moves, it can reach locations with low- or even no- mobile internet coverage. This results in interrupted connections, operation retries, or unavailability of services.
6. On-board data storage
It is a local hardware repository for data generated by the vehicle. It must be clear what data is stored on the cloud and who has access to it (e.g. insurers). It is equally important to reassure customers that their information is protected from unauthorized access from outside.
7. Location and navigation technologies
Monetization also depends on location data. The biggest players of software-defined vehicles must decide how to locate a vehicle (GPS) and decide which specific navigation information should be collected and which map's "technical archetype" to adopt.
8. Environmental sensors
It is not only what happens under the vehicle bonnet that matters, but also what influences it. Therefore, environmental factors provide valuable data. They detect parameters related to e.g. road conditions, weather, etc. They also focus on nearby vehicles and people as well as on the cockpit interior: passengers, transported goods, and the driver.
As for the latter, environmental sensors monitor its physiological condition. Based on fingerprint readers, cameras, and microphones, the technology determines, for example, the driver’s sobriety or the degree of fatigue. It is also possible to control vital signs such as heart rate and blood pressure.
To what extent is such data monetized? It all depends on how willing the customer is to share bio information about themselves and their passengers.
Categories of data collected in the vehicle
Which elements, systems, and subsystems are responsible for collecting valuable data that can be monetized in the automotive industry ? It's time to look at the specific spots in the vehicle that show the greatest potential for data aggregation.
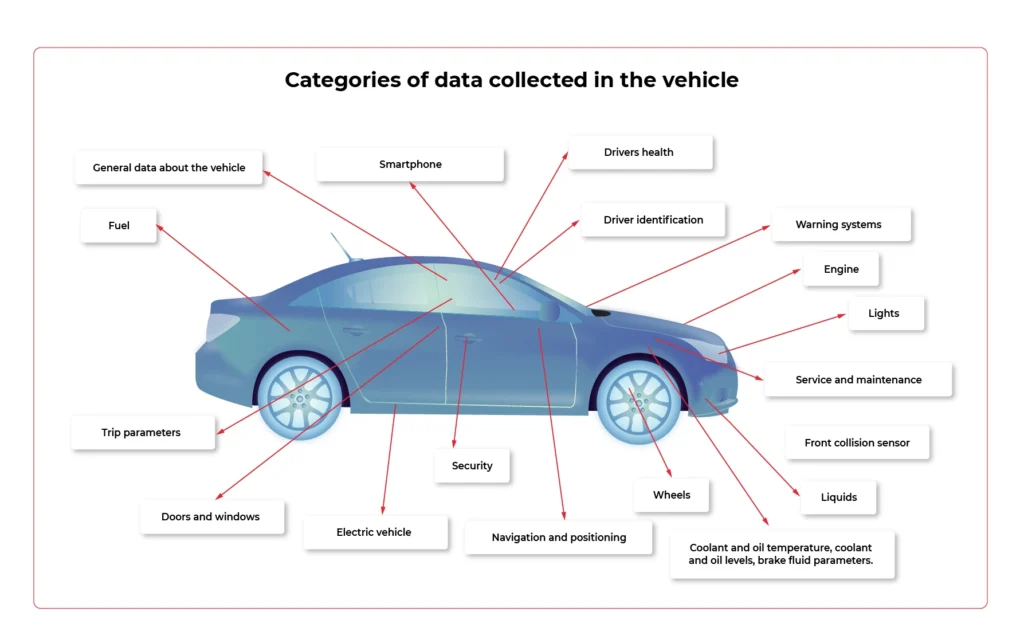
- Front collision sensor
Information about the seriousness of the accident / collision and where it occurred.
- Doors and windows
The condition of the convertible roof, sunroof, doors, windows, bonnet and boot, spoilers and service lap.
- Driver identification
Identifying the person in charge and setting preferential settings for them.
- Drivers health
Pulse, data for diabetics, measuring stress levels.
- Trip parameters
Parameters such as mileage, acceleration / deceleration, remaining range, ECO or SPORT mode activation time, average distance, driving style rating, average fuel consumption, braking intensity and gear behaviour are taken into account.
- Electric vehicle
Battery status and voltage, charging profile and status, power consumption, recovered energy measurement.
- Engine
Ignition status, oil and engine temperature data when we are talking about gasoline/ diesel engine.
- Fuel
Tank capacity and remaining range.
- General data about the vehicle
Information from the display, outside temperature value, VIN number, environment temperature, air conditioning temperature, network connectivity, teleservices availability, vehicle orientation and position.
- Lights
The condition of the headlights and indicators.
- Liquids
Coolant and oil temperature, coolant and oil levels, brake fluid parameters.
- Navigation and positioning
GPS speed, navigation destination, vehicle location (latitude and longitude), time and distance remaining to reach the destination, vehicle alignment, vehicle movement status, most visited places to suggest destinations of travel.
- Security
Technical condition of the seat belts and their fastening, information about airbags.
- Service and maintenance
Date of the next brake fluid inspection and change, time threshold for the main test and exhaust fumes test, ‘check engine’ information.
- Smartphone
Pairing with smartphones, driver behavioural patterns.
- Warning systems
ESP (Electronic Stability Program), ADAS (Advanced Driver Assistance Systems). Data on automatic eCall, battery protection. Messages from sensors (parking, distance, speed).
- Wheels
Tire pressure status, brake pads.
Challenges related to technical possibilities
People responsible for the development and implementation of modern solutions face various challenges. How well they handle them determines the success of monetization.
When analyzing individual systems, you need to take into account such aspects as:
- the frequency of data collection,
- the possibility of updating,
- the improvement of sensors that allow collecting personal data
- maintaining the stability of connections,
- identifying entities that have access to collected data.
How to monetize vehicle data thanks to in-car technologies - the biggest challenges and control points of the process - Part 1
Brook. Not a stream yet, though. But in the foreseeable future, it is going to be a proper river. What are we talking about? Data obtained from vehicles. Experts estimate that data inflow is likely to rise from approximately 33 zettabytes (this is how much we obtained in 2018) to 175 zettabytes in 2052. For OEMs and companies from the broadly-defined automotive industry, this means one thing. Endless monetization possibilities. Providing that they face the challenges connected with data capture, filtering and storage, and become familiar with the in-vehicle technologies enabling that.
The potential is enormous. However, the Capgemini report shows that there is still a long way ahead before reaching its full potential. Today, as many as 44% of OEM customers do not yet avail of any online service in their cars, and still, connecting to the network is just the starting point because without the Internet there is no option of monetizing data. And even if the vehicle is already connected to the network, only every second driver declares frequent use of this type of service.
Anyway, the condition of the Internet is a challenge in itself. Today, in modern vehicles, there are around 100 points from which information can be downloaded (in the future it is estimated that there will be up to 10,000 of them!)
Before we get to know the technologies that enable it (about which we will write in the second part of the article), let's have a look at the challenges and checkpoints that must be considered when creating a data monetization strategy for a software-defined vehicle.
5 things to bear in mind if you want to monetize vehicle data
1. Developing the customer value proposition
This is where it all begins- from creating a sales offer and an environment in which drivers will believe you have something unique and valuable for them. Without trade, no technology will guarantee your success. Customers will simply not want to share data.
Think about the unique offer you want to present to them and develop a clear data management policy. As a result, it should be followed by the selection of appropriate technologies, and then their implementation in vehicles.
Obtaining data to offer the driver safety or a good sense of direction differs from getting information related to entertainment or directing the customer to a sale in a nearby shopping mall.
It would be perfect if the developed customer value proposition was consistent with your brand's DNA and features that have always been associated with it. This would make it easier to convince users, remain in line with your business assumptions, and stand out from the competition. Focus on technology application, not on technology just to be used.
2. Consider matching technology with the data for which users are most likely to "pay"
Speaking of users’ preferences, even today, at the stage when the technologies of obtaining data from vehicles are not fully-fledged yet, it can be seen that for some services customers are willing to give up some of their privacy, while they are largely opposed or reluctant towards others.
Capgemini's research shows that the group with the greatest potential includes services related to safety and facilitating driving:
- hazard warning;
- collision warning;
- theft detection system;
- e-call;
- interactive language assistance.
On the other hand, the greatest objection among users is aroused by services related to broadly -defined shopping:
- In-car delivery;
- in car e-commerce.
Keep this in mind when choosing technology to help you monetize your data.
3. Data collector strategy
The data in the vehicle is acquired by means of special sensors and then sent to collectors, which are supposed to gather this data and enable it to be transferred to the cloud. To effectively filter this data and derive maximum benefit from it, you need reliable technology to facilitate it. Due to the huge amount of data and the interaction between various sensors, the universal data collector is the best solution, as it collects all information obtained from sensors in the car.
In order to fully use its potential, during the implementation phase of this technology, it is crucial to ensure close work of the engineering team with people responsible for digital data management (see the next section). Close cooperation of both teams will help to obtain more interesting data and implement new services more efficiently.
4. Provider of IoT data platform
Collecting data from vehicles is impossible without an IoT platform connected to cloud solutions dedicated to the automotive industry - this is where data is sent and analyzed to be later collected by the vehicle sensors.
Regardless of which platform you choose (the most popular solutions on the market today are: Microsoft Azure, Amazon AWS, and Otonomo, operating in the SaaS system), 5 features that such a platform should have are of paramount importance to enable the efficient flow of information.
You can read more about it in our article on this issue .
5. Data enrichment
While this article focuses on technologies directly related to obtaining data from the vehicle, it should not be overlooked that the software-defined vehicle operates in a wider ecosystem. Monetization of data from vehicles will not be possible without technologies related to infrastructure (e.g. smart-road infrastructure, V2X communication , or high-speed data towers), as well as coordination of back-end processes for which entities such as policymaker, cybersecurity specialist, technical regulator, road infrastructure operator or billing/tolling player are accountable.
To create more valuable and attractive services, a coherent policy is necessary, as it will enrich the data stream from third parties and the user themselves, and will improve cooperation between elements of the ecosystem.
Checkpoints inside the car
In-car technologies are not the only gateway for data that companies can obtain from drivers (another entry point may be, for instance, the driver's smartphone or road infrastructure). However, they are the ones over which OEMs and manufacturers have the greatest control, technically at least.
Before we directly describe the technologies in the vehicle allowing that data to be obtained, let's focus on the checkpoints that are crucial for the capture of information, its quality, and value for building services.
In the software-defined vehicle ecosystem, we can identify three such areas, a kind of bottleneck on which the flow of data depends. These are:
- Vehicle interior and infrastructure.
- Connection to cloud.
- Data cloud.
Let's have a look at the first area, which is practically entirely the responsibility of the automotive company and is directly related to the equipment in the vehicle.
We can list the following groups of such checkpoints which require closer attention when building a data monetization strategy.
1. Gateway to the customer
Key points due to the start of data gathering and the user's experience - their willingness to share data, and thus increasing the value of the gathered data for the manufacturer.
- HMI (i.e. a set of technologies enabling the driver to activate the vehicle and begin collecting data, e.g. touch screens, visual sensors, voice commands, etc. - certainly a topic for a separate article)
- Data gateway (port, mobile data connection, USB port, radio connection)
- Customer ID
2. Points that build loyalty and the need to buy
That is, the contact points with the offer that allow you to easily download new applications, pay bills and influence the user's willingness to renew the service. The more transparent, engaging, and easy-to-use, the more likely the user is to continue their subscription.
- App store / ecosystem
- Billing platform
- In-vehicle infotainment (IVI)
- Apps/ content
3. Key points for data security, data analysis and usability
- CPU/ control unit
- Car sensors / actuators
Software-defined vehicles do not run in a vacuum
When creating a data monetization strategy for a software-defined vehicle, one should always bear in mind the wide ecosystem in which such a vehicle operates. It is not enough to equip it with the technology itself and wait for the flow of data that will turn into specific value for the enterprise . In such a complex and extensive ecosystem, nothing happens by itself. There is no room for improvisation, omitting checkpoints, and presenting half-baked offers. Yes, the technology that downloads data from the vehicle is crucial, but it won't work unless we bear in mind the broader data management context that reaches beyond collecting and analyzing it.
Monitoring your microservices on AWS with Terraform and Grafana - monitoring
Welcome back to the series. We hope you’ve enjoyed the previous part and you’re back to learn the key points. Today we’re going to show you how to monitor the application.
Monitoring
We would like to have logs and metrics in a single place. Let’s imagine you see something strange on your diagrams, mark it with your mouse, and immediately have proper log entries from this particular timeframe and this particular machine displayed below. Now, let’s make it real.
Some basics first. There is a huge difference between the way Prometheus and Loki get the data. Both of them are being called by Grafana to poll data, but Prometheus also actively calls the application to poll metrics. Loki, instead, just listens, so it needs some extra mechanism to receive logs from applications.
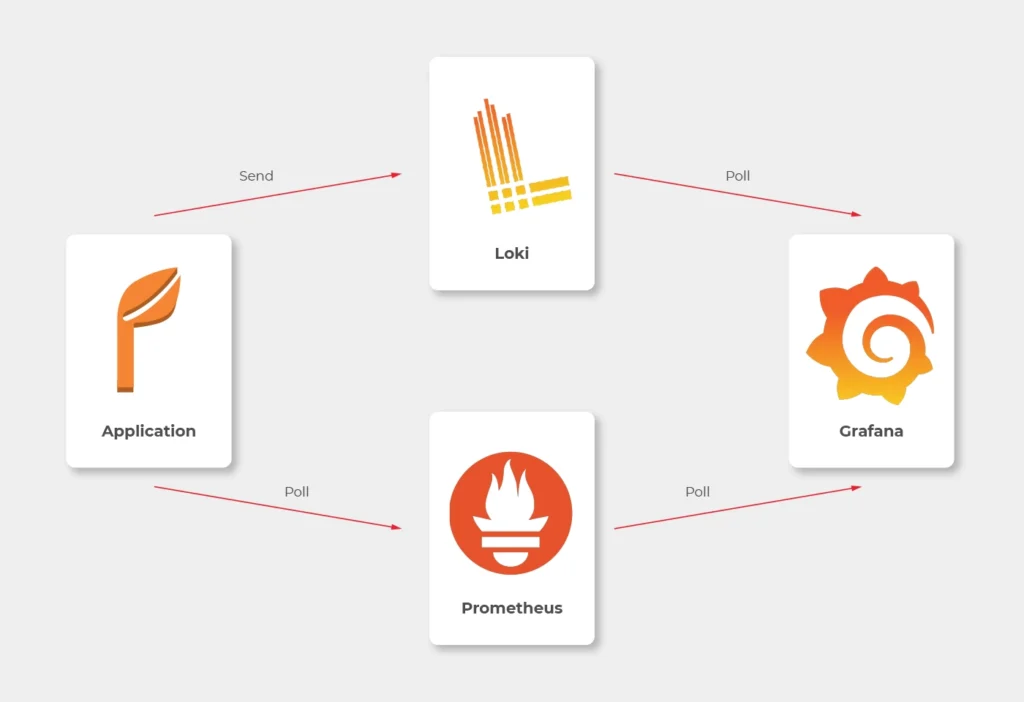
In most sources over the Internet, you’ll find that the best way to send logs to Loki is to use Promtail. This is a small tool, developed by Loki’s authors, which reads log files and sends them entry by entry to remote Loki’s endpoint. But it’s not perfect. Sending multiline logs is still in a bad shape (state for February 2021), some config is really designed to work with Kubernetes only and at the end of the day, this is one more additional application you would need to run inside your Docker image, which can get a little bit dirty. Instead, we propose to use a loki4j logback appender (https://github.com/loki4j). This is a zero-dependency Java library designed to send logs directly from your application.
There is one more Java library needed - Micrometer . We’re going to use it to collect metrics of the application.
So, the proper diagram should look like this.
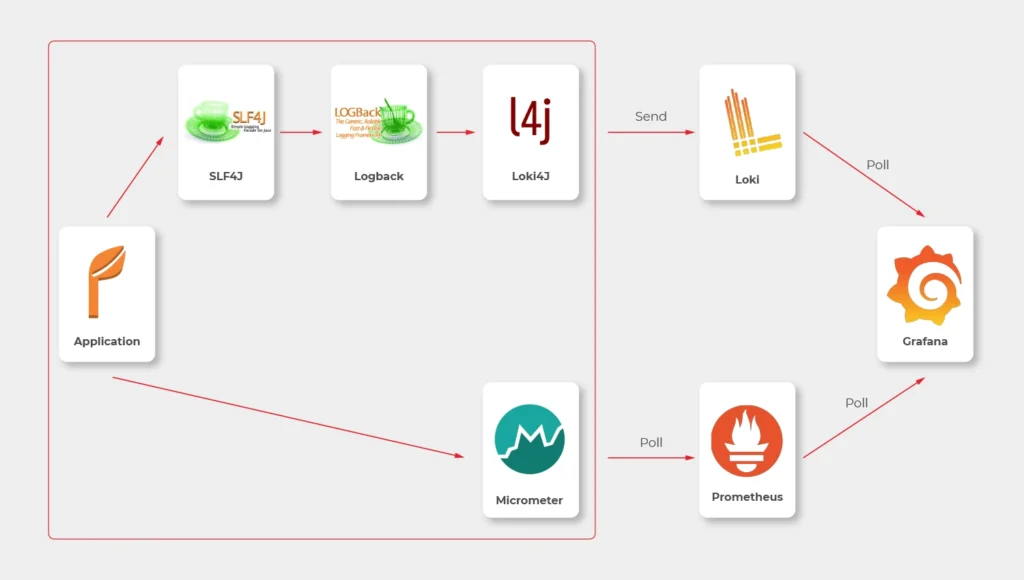
Which means, we need to build or configure the following pieces:
- slf4j (default configuration is enough)
- Logback
- Loki4j
- Loki
- Micrometer
- Prometheus
- Grafana
Micrometer
Let’s start with metrics first.
There are just three things to do on the application side.
The first one is to add a dependency to the Micrometer with Prometheus integration (registry).
<dependency>
<groupId>io.micrometer</groupId>
<artifactId>micrometer-registry-prometheus</artifactId>
</dependency>
Now, we have a new endpoint exposable from Spring Boot Actuator, so we need to enable it.
management:
endpoints:
web:
exposure:
include: prometheus,health
This is a piece of configuration to add. Make sure you include prometheus in both config server and config clients’ configuration. If you have some Web Security configured, make sure to enable full access to /actuator/health and /actuator/prometheus endpoint.
Now we would like to distinguish applications in our metrics, so we have to add a custom tag in all applications. We propose to add this piece of code as a Java library and import it with Maven.
@Configuration
public class MetricsConfig {
@Bean
MeterRegistryCustomizer<MeterRegistry> configurer(@Value("${spring.application.name}") String applicationName) {
return (registry) -> registry.config().commonTags("application", applicationName);
}
}
Make sure you have spring.application.name configured in all bootstrap.yml files in config clients and application.yml in the config server.
Prometheus
The next step is to use a brand new /actuator/prometheus endpoint to read metrics in Prometheus.
The ECS configuration is similar to backend services. The image you need to push to your ECR should look like that.
FROM prom/prometheus
COPY prometheus.yml .
ENTRYPOINT prometheus --config.file=prometheus.yml
EXPOSE 9090
As Prometheus doesn’t support HTTPS endpoints, it’s just a temporary solution, and we’ll change it later.
The prometheus.yml file contains such a configuration.
scrape_configs:
- job_name: 'cloud-config-server'
metrics_path: '/actuator/prometheus'
scrape_interval: 5s
dns_sd_configs:
- names:
- '$cloud_config_server_url'
type: 'A'
port: 8888
- job_name: 'foo'
metrics_path: '/actuator/prometheus'
scrape_interval: 5s
dns_sd_configs:
- names:
- '$foo_url
type: 'A'
port: 8080
- job_name: bar
metrics_path: '/actuator/prometheus'
scrape_interval: 5s
dns_sd_configs:
- names:
- '$bar_url
type: 'A'
port: 8080
- job_name: 'backend_1'
metrics_path: '/actuator/prometheus'
scrape_interval: 5s
dns_sd_configs:
- names:
- '$backend_1_url
type: 'A'
port: 8080
- job_name: 'backend_2'
metrics_path: '/actuator/prometheus'
scrape_interval: 5s
dns_sd_configs:
- names:
- '$backend_2_url
type: 'A'
port: 8080
Let’s analyse the first job as an example.
We would like to call '$cloud_config_server_url' url with '/actuator/prometheus' relative path on a port 8080 . As we’ve used dns_sd_configs and type: 'A', the Prometheus can handle multivalue DNS answers from the Service Discovery, to analyze all tasks in each service. Please make sure you replace all ' $x' variables in the file with proper URLs from the Service Discovery.
The Prometheus isn’t exposed to the public load balancer, so you cannot verify your success so far. You can expose it temporarily or wait for Grafana.
Logback and Loki4j
If you use the Spring Boot, you probably already have spring-boot-starter-logging
library included. Therefore, you use logback as the default slf4j integration. Our job now is to configure it to send logs to Loki. Let’s start with the dependency:
<dependency>
<groupId>com.github.loki4j</groupId>
<artifactId>loki-logback-appender</artifactId>
<version>1.1.0</version>
</dependency>
Now let’s configure it. The first file is called logback-spring.xml and located in the config server next to the application.yml (1) file.
<?xml version="1.0" encoding="UTF-8"?>
<configuration>
<property name="LOG_PATTERN" value="%d{yyyy-MM-dd HH:mm:ss.SSS} %-5level [%thread] %logger - %msg%n"/>
<appender name="Console" class="ch.qos.logback.core.ConsoleAppender">
<encoder>
<pattern>${LOG_PATTERN}</pattern>
</encoder>
</appender>
<springProfile name="aws">
<appender name="Loki" class="com.github.loki4j.logback.Loki4jAppender">
<http>
<url>${LOKI_URL}/loki/api/v1/push</url>
</http>
<format class="com.github.loki4j.logback.ProtobufEncoder">
<label>
<pattern>application=spring-cloud-config-server,instance=${INSTANCE},level=%level</pattern>
</label>
<message>
<pattern>${LOG_PATTERN}</pattern>
</message>
<sortByTime>true</sortByTime>
</format>
</appender>
</springProfile>
<root level="INFO">
<appender-ref ref="Console"/>
<springProfile name="aws">
<appender-ref ref="Loki"/>
</springProfile>
</root>
</configuration>
What do we have here? There are two appenders with the common pattern, and one root logger. So we start with pattern configuration <property name="LOG_PATTERN" value="%d{yyyy-MM-dd HH:mm:ss.SSS} %-5level [%thread] %logger - %msg%n"/> . Of course you can configure it, as you want.
Then, the standard console appender. As you can see, it uses the LOG_PATTERN .
Then you can see the com.github.loki4j.logback.Loki4jAppender appender. This way the library is being used. We’ve used < springProfile name="aws" > profile filter to enable it only in the AWS infrastructure and disable locally. We use the same when using the appender with appender-ref ref="Loki" . Please note the label pattern, used here to label each log with custom tags (application, instance, level). Another important part here is Loki’s URL. We need to provide it as an environment variable for the ECS task. To do that, you need to add one more line to your aws_ecs_task_definition configuration in terraform.
"environment" : [
...
{ "name" : "LOKI_URL", "value" : "loki.internal" }
],
As you can see, we defined “loki.internal” URL and we’re going to create it in a minute.
There are few issues with logback configuration for the config clients.
First of all, you need to provide the same LOKI_URL environment variable to each client, because you need Loki before reading config from the config server.
Now, let’s put another logback-spring.xml file in the config server next to the applic ation.yml (2) file.
<?xml version="1.0" encoding="UTF-8"?>
<configuration>
<property name="LOG_PATTERN" value="%d{yyyy-MM-dd HH:mm:ss.SSS} %-5level [%thread] %logger - %msg%n"/>
<springProperty scope="context" name="APPLICATION_NAME" source="spring.application.name"/>
<appender name="Console" class="ch.qos.logback.core.ConsoleAppender">
<encoder>
<pattern>\${LOG_PATTERN}</pattern>
</encoder>
</appender>
<springProfile name="aws">
<appender name="Loki" class="com.github.loki4j.logback.Loki4jAppender">
<http>
<requestTimeoutMs>15000</requestTimeoutMs>
<url>\${LOKI_URL}/loki/api/v1/push</url>
</http>
<format class="com.github.loki4j.logback.ProtobufEncoder">
<label>
<pattern>application=\${APPLICATION_NAME},instance=\${INSTANCE},level=%level</pattern>
</label>
<message>
<pattern>\${LOG_PATTERN}</pattern>
</message>
<sortByTime>true</sortByTime>
</format>
</appender>
</springProfile>
<root level="INFO">
<appender-ref ref="Console"/>
<springProfile name="aws"><appender-ref ref="Loki"/></springProfile>
</root>
</configuration>
The first change to notice are slashes before environment variables (eg. \${LOG_PATTERN } ). We need it to tell the config server not to resolve variables on it’s side (because it’s impossible). The next difference is a new variable <springProperty scope="context" name="APPLICATION_NAME" source="spring.application.name"/> . with this line and spring.application.name in all your applications each log will be tagged with a different name. There is also a trick with the ${INSTANCE} variable. As Prometheus uses IP address + port as an instance identifier and we want to use the same here, we need to provide this data to each instance separately.
So your Dockerfile files for your applications should have something like that.
FROM openjdk:15.0.1-slim
COPY /target/foo-0.0.1-SNAPSHOT.jar .
ENTRYPOINT INSTANCE=$(hostname -i):8080 java -jar foo-0.0.1-SNAPSHOT.jar
EXPOSE 8080
Also, to make it working, you are supposed to tell your clients to use this configuration. Just add this to bootstrap.yml files in all you config clients.
logging:
config: ${SPRING_CLOUD_CONFIG_SERVER:http://localhost:8888}/application/default/main/logback-spring.xml
spring:
application:
name: foo
That’s it, let’s move to the next part.
Loki
Creating Loki is very similar to Prometheus. Your dockerfile is as follows.
FROM grafana/loki
COPY loki.yml .
ENTRYPOINT loki --config.file=loki.yml
EXPOSE 3100
The good news is, you don’t need to set any URLs here - Loki doesn’t send any data. It just listens.
As a configuration, you can use a file from https://grafana.com/docs/loki/latest/configuration/examples/ . We’re going to adjust it later, but it’s enough for now.
Grafana
Now, we’re ready to put things together.
In the ECS configuration, you can remove service discovery stuff and add a load balancer, because Grafana will be visible over the internet. Please remember, it’s exposed at port 3000 by default.
Your Grafana Dockerfile should be like that.
FROM grafana/grafana
COPY loki_datasource.yml /etc/grafana/provisioning/datasources/
COPY prometheus_datasource.yml /etc/grafana/provisioning/datasources/
COPY dashboad.yml /etc/grafana/provisioning/dashboards/
COPY *.json /etc/grafana/provisioning/dashboards/
ENTRYPOINT [ "/run.sh" ]
EXPOSE 3000
Let’s check configuration files now.
loki_datasource.yml:
apiVersion: 1
datasources:
- name: Loki
type: loki
access: proxy
url: http://$loki_url:3100
jsonData:
maxLines: 1000
I believe the file content is quite obvious (we'll return here later).
prometheus_datasource.yml:
apiVersion: 1
datasources:
- name: prometheus
type: prometheus
access: proxy
orgId: 1
url: https://$prometheus_url:9090
isDefault: true
version: 1
editable: false
dashboard.yml:
apiVersion: 1
providers:
- name: 'Default'
folder: 'Services'
options:
path: /etc/grafana/provisioning/dashboards
With this file, you tell Grafana to install all json files from /etc/grafana/provisioning/dashboards directory as dashboards.
The last leg is to create some dashboards. You can, for example, download a dashboard from https://grafana.com/grafana/dashboards/10280 and replace ${DS_PROMETHEUS} datasource with your name “prometheus”.
Our aim was to create a dashboard with metrics and logs at the same screen. You can play with dashboards as you want, but take this as an example.
{
"annotations": {
"list": [
{
"builtIn": 1,
"datasource": "-- Grafana --",
"enable": true,
"hide": true,
"iconColor": "rgba(0, 211, 255, 1)",
"name": "Annotations & Alerts",
"type": "dashboard"
}
]
},
"editable": true,
"gnetId": null,
"graphTooltip": 0,
"id": 2,
"iteration": 1613558886505,
"links": [],
"panels": [
{
"aliasColors": {},
"bars": false,
"dashLength": 10,
"dashes": false,
"datasource": null,
"fieldConfig": {
"defaults": {
"custom": {}
},
"overrides": []
},
"fill": 1,
"fillGradient": 0,
"gridPos": {
"h": 8,
"w": 24,
"x": 0,
"y": 0
},
"hiddenSeries": false,
"id": 4,
"legend": {
"avg": false,
"current": false,
"max": false,
"min": false,
"show": true,
"total": false,
"values": false
},
"lines": true,
"linewidth": 1,
"nullPointMode": "null",
"options": {
"alertThreshold": true
},
"percentage": false,
"pluginVersion": "7.4.1",
"pointradius": 2,
"points": false,
"renderer": "flot",
"seriesOverrides": [],
"spaceLength": 10,
"stack": false,
"steppedLine": false,
"targets": [
{
"expr": "system_load_average_1m{instance=~\"$instance\", application=\"$application\"}",
"interval": "",
"legendFormat": "",
"refId": "A"
}
],
"thresholds": [],
"timeRegions": [],
"title": "Panel Title",
"tooltip": {
"shared": true,
"sort": 0,
"value_type": "individual"
},
"type": "graph",
"xaxis": {
"buckets": null,
"mode": "time",
"name": null,
"show": true,
"values": []
},
"yaxes": [
{
"format": "short",
"label": null,
"logBase": 1,
"max": null,
"min": null,
"show": true
},
{
"format": "short",
"label": null,
"logBase": 1,
"max": null,
"min": null,
"show": true
}
],
"yaxis": {
"align": false,
"alignLevel": null
}
},
{
"datasource": "Loki",
"fieldConfig": {
"defaults": {
"custom": {}
},
"overrides": []
},
"gridPos": {
"h": 33,
"w": 24,
"x": 0,
"y": 8
},
"id": 2,
"options": {
"showLabels": false,
"showTime": false,
"sortOrder": "Ascending",
"wrapLogMessage": true
},
"pluginVersion": "7.3.7",
"targets": [
{
"expr": "{application=\"$application\", instance=~\"$instance\", level=~\"$level\"}",
"hide": false,
"legendFormat": "",
"refId": "A"
}
],
"timeFrom": null,
"timeShift": null,
"title": "Logs",
"type": "logs"
}
],
"schemaVersion": 27,
"style": "dark",
"tags": [],
"templating": {
"list": [
{
"allValue": null,
"current": {
"selected": false,
"text": "foo",
"value": "foo"
},
"datasource": "prometheus",
"definition": "label_values(application)",
"description": null,
"error": null,
"hide": 0,
"includeAll": false,
"label": "Application",
"multi": false,
"name": "application",
"options": [],
"query": {
"query": "label_values(application)",
"refId": "prometheus-application-Variable-Query"
},
"refresh": 2,
"regex": "",
"skipUrlSync": false,
"sort": 0,
"tagValuesQuery": "",
"tags": [],
"tagsQuery": "",
"type": "query",
"useTags": false
},
{
"allValue": null,
"current": {
"selected": false,
"text": "All",
"value": "$__all"
},
"datasource": "prometheus",
"definition": "label_values(jvm_classes_loaded_classes{application=\"$application\"}, instance)",
"description": null,
"error": null,
"hide": 0,
"includeAll": true,
"label": "Instance",
"multi": false,
"name": "instance",
"options": [],
"query": {
"query": "label_values(jvm_classes_loaded_classes{application=\"$application\"}, instance)",
"refId": "prometheus-instance-Variable-Query"
},
"refresh": 2,
"regex": "",
"skipUrlSync": false,
"sort": 0,
"tagValuesQuery": "",
"tags": [],
"tagsQuery": "",
"type": "query",
"useTags": false
},
{
"allValue": null,
"current": {
"selected": false,
"text": [
"All"
],
"value": [
"$__all"
]
},
"datasource": "Loki",
"definition": "label_values(level)",
"description": null,
"error": null,
"hide": 0,
"includeAll": true,
"label": "Level",
"multi": true,
"name": "level",
"options": [
{
"selected": true,
"text": "All",
"value": "$__all"
},
{
"selected": false,
"text": "ERROR",
"value": "ERROR"
},
{
"selected": false,
"text": "INFO",
"value": "INFO"
},
{
"selected": false,
"text": "WARN",
"value": "WARN"
}
],
"query": "label_values(level)",
"refresh": 0,
"regex": "",
"skipUrlSync": false,
"sort": 0,
"tagValuesQuery": "",
"tags": [],
"tagsQuery": "",
"type": "query",
"useTags": false
}
]
},
"time": {
"from": "now-24h",
"to": "now"
},
"timepicker": {},
"timezone": "",
"title": "Logs",
"uid": "66Yn-8YMz",
"version": 1
}
We don’t recommend playing with such files manually when you can use a very convenient UI and export a json file later on. Anyway, the listing above is a good place to start. Please note the following elements:
In variable’s definitions, we use Prometheus only, because Loki doesn’t expose any metric so you cannot filter one variable (instance) when another one (application) is selected.
Because we would like to sometimes see all instances or log levels together, we need to query data like here: {application=\"$application\", instance=~\"$instance\", level=~\"$level \"}" . The important element is a tilde in instance=~\"$instance\" and level=~\"$level\" , which allows us to use multiple values.
Conclusion
Congratulation! You have your application monitored. We hope you like it! But please remember - it’s not production-ready yet! In the last part, we’re going to cover a security issue - add encryption at transit to all components.
Kubernetes supports Windows workloads - the time to get rid of skeletons in your closet has come
Enterprises know that the future of their software is in the cloud. Despite keeping that in mind, many tech leaders delay the process of transforming their core legacy systems. How will the situation change with Kubernetes supporting Windows workloads? Can we assume that companies will leverage the Kubernetes upgrade to accelerate their journey towards the cloud?
How can this article help you?
- You can see what Kubernetes supporting Windows workloads provides for enterprises.
- We remind you why going to the cloud is crucial for your business excellence.
- You can get to know the main reason stopping enterprises from transforming their legacy systems.
- We describe the main risks that come with delaying the transition towards the cloud.
- You learn how to leverage Kubernetes supporting Windows workloads.
Technical debt is an unpleasant legacy you often come into money while taking charges of critical systems or enterprise software older than you. Laying under the cache layer and various interfaces, legacy systems encourage you to forget them. And you are good with it - you have enough tasks to perform and things to manage on a daily basis. Sprint after sprint, your team deals with developing applications and particular features to meet increasing customer demand and sophisticated needs. Initiating a tremendous venture, which may transform into opening Pandora's box, it's not exactly what you want to add to your checklist.
The bad news is that if you're willing to be successful at your job, the clock is ticking. The problem with legacy systems is that you don't know when they break down, causing disaster. You will justify yourself, but the impact on your work will be nightmarish. What you know for sure, legacy systems under applications built by your talented teams hinder further development and make your job harder than it already is.
Whatever you are going to go for it all or don't want to throw yourself in at the deep end - Kubernetes supporting Windows workloads is the news you needed. See how it can accelerate your transition towards the cloud.
What's the deal with Kubernetes supporting Windows workloads
Kubernetes was designed to run Linux containers. Such an approach complicated the transition towards the cloud for enterprises with Windows Server legacy systems. And while over 70% of the global server market is Windows-based (according to Statista), we can see why so many legacy apps are in the closets. If you work at a large enterprise, the chances that you have a few of them hidden carefully are very high.
How supporting Windows workloads by Kubernetes is changing the game? In the - not so much - olden days, Windows-based applications were immovable - they needed to be run on Windows, required Windows server, and access to numerous related databases and libraries. Such a demanding environment encouraged enterprises to wait for better days. And now they have come. Kubernetes, with production support for scheduling Windows containers on Windows nodes in the platform cluster, allows for running these Windows applications, enabling enterprises to modernize and move their apps to the cloud.
It’s believed that with this release, Kubernetes provides enterprises with the opportunity to accelerate their DevOps and cloud transformation . In case you missed 1 mln publications about cloud advantages, we will write up the main points.
Why do enterprises move their legacy applications to the cloud
As promised above, let’s keep it short:
- Scalability - the cloud allows you to easily manage your IT resources, data storage capacity, computing power, and networking (in both ways) without downtimes or other disruptions. Such flexibility supports business growth, product/service development, and better cost management.
- Security - the right set of strategies and policies allow enterprises to build and manage secure cloud environments. Decentralization and support for your cloud stack provide solutions to common challenges in maintaining on-premise infrastructure.
- Maintenance - using cloud services delivered by trusted providers, you don't have to maintain many things on your own, just leveraging available services.
- Accessibility - the pandemic showed us how crucial is remote access to our IT resources, and the cloud provides your remote or distributed teams with easy access regardless of your team members' localization - that is priceless.
- Reliability - cloud providers ensure easier and cheaper data backups, disaster recovery, and business continuity as they use the economy at scale.
- Performance - as the cloud service market is blooming and service providers are competing about increasing revenues, the quality and performance of cloud infrastructure are top-notch.
- Cost-effectiveness - with cloud computing, your enterprise can cut off numerous spendings from your books - including infrastructure, electricity, and IT experts responsible for managing resources.
- Agility - forget about capacity planning while your computing provisioning can be done within a few clicks leveraging self-service.
Sounds convincing? If everything is obvious, why are there still so many legacy apps?
Why do enterprises delay with moving apps to the cloud
Legacy systems are long-time friends with procrastination. If you are long enough in this business, you have definitely heard a few of these excuses:
- We cannot do it now. We have too many things on the list. A better day will come.
- It’s risky. It’s critically risky. Why do you even ask? Do you want to see the world burning?
- Ok, let’s do it! But wait….who knows how to do it?
- We can cover it with our UI or cache layer, and nobody will ever notice.
- It’s our core system. You touch it, everything will go bad.
- Why change it if it works well?
- It’s a too huge project for me to decide and take responsibility for the never-ending process.
These are some examples from the top of the iceberg. Diving into the process of moving legacy apps to the cloud , you can stumble upon numerous points convincing you to stay out of them. But can it last forever? What if the “zero hour” strikes?
Playing a risky game: what can happen if you don’t migrate to the cloud
Many of our business challenges wouldn’t have existed if we, at some point, tackled the underestimated issues. The excuses highlighted above can convince you to leave things as they are. But what if your real problems are just ahead of you? Let’s name some threats that may occur at enterprises that delay transition towards the cloud.
- Maintaining legacy systems becomes more expensive with time as your company has to pay for computing power supporting these solutions.
- Your enterprise may face a huge challenge to find experts understanding your legacy systems. The longer you postpone the process, the harder it will be to look for people working with frameworks and tools that are outdated.
- By allowing for increasing your technical debt, your enterprise acts against your willingness for innovation. Your legacy systems suppress the development of new products and services, undermining your competitive advantage.
- You can face a challenge to provide services to your customers because of downtimes and distractions caused by inefficient systems.
- Technology develops fast. Legacy systems stop you from participating in the movement and may generate new issues in the future, especially in the time you will need to be flexible.
- Most established enterprises work on highly regulated markets and have to meet challenging conditions. One of our business partners had to rebuild one of its core systems because of new regulations regarding data management. Such a situation can lead to enormous costs.
- There appears a serious security threat as legacy systems are prone to attacks, and without upgrades, your system may become insecure.
The list above can be expanded to many additional issues. But instead of describing challenges, let’s discuss how they can be addressed using Kubernetes .
How to leverage Kubernetes supporting Windows workloads
There is a ton of code written on Windows. With the Kubernetes update, you don’t have to think about rebuilding your applications from scratch, so myriads of working hours spent by your team are secured. Most of the code can be moved to the Kubernetes container and there developed. It’s safer and cheaper.
Kubernetes supporting Windows workloads gives you time to navigate your journey to the cloud properly. First of all, it ends the discussion for all those excuses mentioned above. The moment is now. Secondly, you can now utilize an evolutionary approach by developing and upgrading your systems instead of building them from ground zero. Furthermore, with your key legacy systems moved to the cloud, you can accelerate the overall transformation at your enterprise towards an agile, DevOps-oriented organization open to innovation and developing highly competitive software.
What should be your next move?
By supporting Windows workloads, Kubernetes makes the life of many tech teams easier. But it would be too easy if everything worked by itself. Configuration of the Kubernetes cluster to utilize Windows workloads is demanding and time-consuming. Instead of doing it on your own, you can leverage the ready-to-use solution provided by Grape Up. Cloudboostr , our Kubernetes stack, enables you to move your Windows-based apps to the cloud. Consult our expert on how to do it properly!

The next step for digital twin – virtual world
Digital Twin is a widely spread concept of creating a virtual representation of object state. The object may be small, like a raindrop, or huge as a factory. The goal is to simplify the operations on the object by creating a set of plain interfaces and limiting the amount of stored information. With a simple interface, the object can be easily manipulated and observed, while the state of its physical reflection is adjusted accordingly.
In the automotive and aerospace industries , this is a common approach to use virtual objects representation to design, develop, test, manufacture, and operate both parts of a vehicle, like an engine, drivetrain, chassis/fuselage, or a full vehicle – a whole car, motorcycle, truck or aircraft. Virtual representations are easier to experiment with, especially on a bigger scale, and to operate - especially in situations when connectivity between a vehicle and the cloud is not stable ability to query the state anyway is vital to provide a smooth user experience.
It’s not always critical to replicate the object with all details. For some use cases, like airflow modeling for calculating drag force, mainly exterior parts are important. For computer vision AI simulation, on the other hand, user checking if the doors and windows are locked only requires a boolean true/false state. And to simulate the combustion process in the engine, even the vehicle type is not important.
Today, artificial intelligence takes a significant role in a lot of car systems, to name a few: driver assistance, fatigue check, predictive maintenance, emergency braking, and collision avoidance, speed limit recognition, and prediction. Most of those systems do not live in a void - to operate correctly they require information about the surrounding world gathered through V2X connections, cameras, radars, lidars, GPS position, thermometers, or ABS/ESP sensors.
Let’s take Adaptive Cruise Control (ACC). The vehicle is kept in lane using computer vision and a front-facing camera. The distance to surrounding vehicles and obstacles is calculated using both a camera and a radar/lidar. Position on the map is gathered using GPS, and the speed limit is jointly calculated using the navigation system, road sign recognition, and distance to the vehicle ahead. This is an example of a complex system, which is hard to test - all parts of it have to be simulated separately, for example, by injecting a fake GPS path. Visualizing this kind of test system is complicated, and it’s hard to use data gathered from the car to reproduce the failure scenarios.
Here the Virtual World comes to help. The virtual world is an extension of the vehicle shadow concept where the multiple types of digital twins coexist in the same environment knowing their presence and interfaces. The system is composed of digital representation of physical assets whenever possible – including elements recognized via computer vision. Vehicles, road infrastructure, positioning systems, or even pedestrians are part of the virtual world. All vehicles are part of the same environment meaning they can share the data regarding the position of other traffic participants.

- Such a system provides multiple benefits: Improved accuracy of assistance systems, as the recognized infrastructure and traffic participants can come from other vehicles, and their position can be estimated even when they are still outside the range of sensors.
- Easier, more robust communication between infrastructure, vehicles, pedestrians, and cloud APIs as everything remains in the same digital system.
- Possibility to fully reproduce conditions of system failure as the state history of not just vehicle, but all of its surrounding remains in cloud and can be used to recreate and visualize the area.
- Ability to enhance existing systems leveraging data from the greater area - for example, immediately notifying about an obstacle on the road in 500 meters and suggestion to reduce speed.
- The extensive information set can be used to build new AI/ML applications, like real-time weather information (rain sensor) can be built to close sunroofs of vehicles parked in the area.
- The same system can be used to better simulate its behavior, even using data from real vehicles.
- Common interfaces allow for quicker implementation.
Obviously, there are also challenges - the amount of data to be stored is huge, so it should be heavily optimized, and storage has to be highly scalable. There is also an impact of the connection between the car and the cloud . Overall, the advantages overweight the disadvantages, and the Virtual World will be a common pattern in the next years with the growing implementation of software-defined vehicles and machine learning applications requiring more and more data to improve its operations.
IoT SaaS - why automotive industry should care, and which AWS IoT or Azure IoT is better to use as a base platform for connected vehicle development
We're connected. There’s no doubt about it. At work, at home, in town, on holidays. Our life is no longer divided into offline and online, digital and analog. Our life is somewhere in between, and it happens in both worlds at once. Also in our car, where we expect access to data, instant updates, entertainment, and understanding of our needs. The proven IoT SaaS platform makes this much easier. Today choosing this option is crucial for every company in the automotive industry. Without it, the connected vehicle wouldn’t exist.
What you will learn from this article:
- Why an automotive company needs cloud services and how to build new business value on them
- What features an IoT platform for the automotive industry should have
- What cloud solutions are chosen by the largest producers
Before our very eyes, the car is becoming part of the Internet of Things ecosystem. We want safer driving and 'being led by the hand', ease of integration with external digital services like music streaming, automatic parking payments, or real-time traffic alerts, and the transfer of virtual experiences from one tool to another (including the car).
The vehicles we drive have become more service-oriented, which not only creates new options and business opportunities for companies from the automotive sector but also poses potential threats.
A hacking attack on a phone may result in money loss or compromising the user, whereas an attack on a car can have much more serious consequences. This is why choosing the platform for a connected vehicle is crucial.
Let's have a look at the basic assumptions that such a platform should meet. Let's get to know the main service providers and market use cases influencing the choice of the largest brands in the automotive industry.
5 must-haves for every IoT SaaS platform
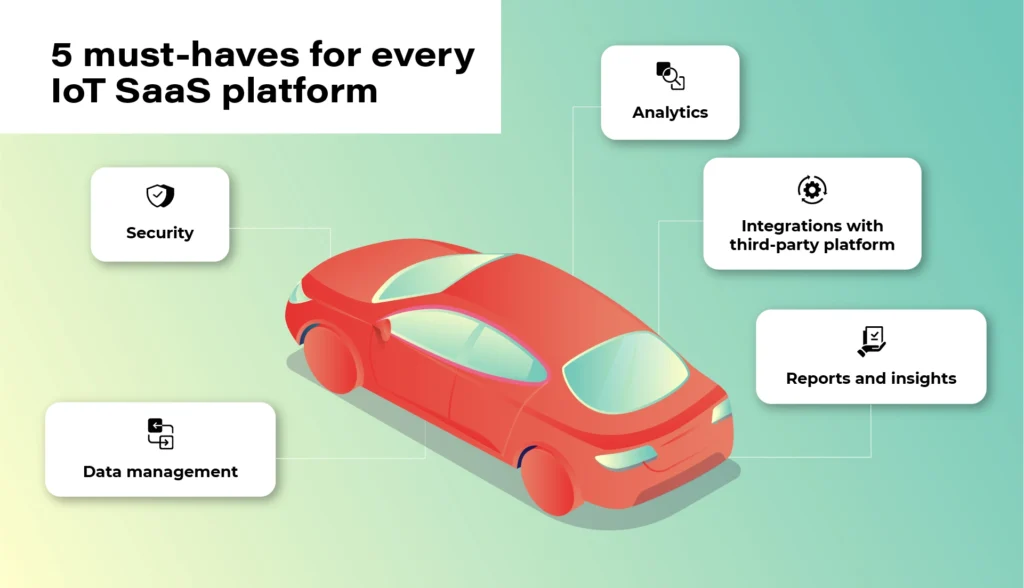
1. Security
At the heart of the Internet of Things is data. However, no one will share it unless the system guarantees an appropriate level of security and privacy. Access authorization is meant for selected users and platforms only. Authentication is geared to prevent unwanted third-party devices from connecting to the vehicle. Finally, there is also an option of blocking devices reaching their limits of usage or ones that have become unsafe. These types of elements that make up the security of the platform are a necessary condition to consider the implementation of the platform in your own vehicle fleet.
2. Data
The connected vehicle continuously receives and sends data. The vehicle communicates not only with other moving vehicles but also with the city and road infrastructure and third-party platforms. Data management, storage, and analysis are the gist of the entire IoT ecosystem. For everything to run smoothly and in line with security protocols, devices need to get data directly from your IoT platform, not from devices. Only in this way will you get a bigger picture of the whole, plus the option of comprehensive analysis- hence the possibility of monetization and obtaining additional business value .
3. Analytics
Once we have the guarantee that the data is safe and obtained from the right sources, we can start analyzing it. A good IoT platform allows it to be analyzed in real-time, but also in relation to past events. It also allows you to predict events before they happen - for example, it will warn the user about replacing a specific component before it breaks down. It is important that the platform collects and analyses data from the entire spectrum of events. Only in this way can it create a comprehensive picture of the real situation.
4. Integrations
The number of third-party platforms that the driver can connect to their car will continue to increase. You have to be prepared for this and choose a solution that will be able to evolve along with market changes. The openness of the system (combined with its security) will keep you going and expand your potential monetization possibilities.
When the system is shut down, you may have to replace some devices or make constant programming changes to communication protocols in the near future.
5. Reports
With this amount of data, since thousands or even hundreds of thousands of vehicles can be pinned to the platform - transparent data reporting becomes necessary. Some of the information may be irrelevant, some will gain significance only in combination with others, some will be more or less important for your business (different aspects will be pointed out by a company operating in the area of shared mobility , as opposed to a company managing a lorry fleet).
Your IoT platform must enable you to easily access, select and present key information in a way that will be clear to each employee, not business intelligence experts only.
We need data to draw constructive business conclusions, not to be bombarded with useless information.
Top market solutions - use cases of the biggest automotive brands
All right. So what solution should you opt for? There is no one, obvious answer to this question. It all depends on your individual needs, the scale of the business, and the cooperation model that is key for you.
You can focus on larger market players and scalable solutions - e.g. the Microsoft Azure platform or AWS by Amazon or on services in the SaaS model provided e.g. by players such as Otonomo, Octo, Bosch, or Ericsson.
Microsoft Azure x Volkswagen

The Azure platform, created by the technological giant from Redmond, has been known to developers and cloud architects for a long time. No wonder that it is often used by the most famous brands in the automotive industry. Microsoft is supported by the scale of its projects, excellent understanding of cloud technologies, and experience in creating solutions dedicated to the world's largest brands.
In 2020, based on these solutions, Volkswagen implemented its own Automotive Cloud platform (by its subsidiary - CARIAD, previously called CarSoftware.org.)
Powered by Microsoft Azure cloud and IoT Edge solutions, the platform will support the operation of over 5 million new Volkswagens every year. The company also plans to transfer technology to other vehicles from the group in all regions of the world, and by doing this, laying the foundations for customer-centric services.
As the brand writes in its press release, the platform is focused on „providing new services and solutions, such as in-car consumer experiences, telematics, and the ability to securely connect data between the car and the cloud.”
For this purpose, Volkswagen has also created a dedicated consumer platform - Volkswagen We, where car users will find smart mobility services and connectivity apps for their vehicles.
AWS x Ford and Lyft

Over 13 years on the market and „165 fully featured services for computing, storage, databases, networking, analytics, robotics, machine learning and artificial intelligence (AI), Internet of Things (IoT), mobile, security, hybrid, virtual and augmented reality (VR and AR), media….” support AWS, or the Amazon cloud solutions.
For people from the automotive industry, a great advantage is a huge brand community and an extensive ecosystem of other services such as movie streaming (Prime Video), voice control (Alexa), or shopping in Amazon Go stores, which can create new business opportunities for companies providing automotive solutions.
The Amazon platform was selected, among others, by the Ford Motor Company (in cooperation with Transportation Mobility Cloud), and by Lyft in the shared mobility sector.
Ford and creators of the Transportation Mobility Cloud (TMC) Autonomic justified the choice of that solution as follows: [we choose] „AWS for its global availability, and the breadth and depth of AWS’ portfolio of services, including Internet of Things (IoT), machine learning, analytics, and compute services”. The collaboration with Amazon is intended to help the brands expand the availability of cloud connectivity services and connected car application development services for the transportation industry”.
Based on the Amazon DynamoDB (NoSQL database) service, Lyft chose Amazon services to be able to easily track users’ journeys, precisely calculate routes and manage the scale of the process during the communication peak, holidays, and days off.
Chris Lambert, CTO at Lyft, commented on the brand's choice: „By operating on AWS, we are able to scale and innovate quickly to provide new features and improvements to our services and deliver exceptional transportation experiences to our growing community of Lyft riders. […] we don’t have to focus on the undifferentiated heavy lifting of managing our infrastructure, and can concentrate instead on developing and improving services with the goal of providing the best transportation experiences for riders and drivers, and take advantage of the opportunity for Lyft to develop best-in-class self-driving technology.”
BMW & MINI x Otonomo

Transforming data to revolutionize driving and transportation. Otonomo, the IoT platform operating in the SaaS model, using this slogan is trying to convince the automotive industry to avail of its services.
Among its customers, BMW and belonging to the same MINI group are particularly noteworthy. The vehicles have been connected to the platform in 44 countries and are intended to provide additional information for road traffic, smart cities, and improve the overall driving experience.
Among the data to be collected by the vehicles, the manufacturer mentions information on the availability of parking lots, traffic congestion, and traffic itself in terms of city planning, real-time traffic intelligence, local hazard warning services, mapping services, and municipal maintenance and road optimization.
Volvo x Ericsson Connected Vehicle Cloud

Partnerships with telecommunications companies are also a common business model in creating cloud services for vehicles. This kind of cooperation was chosen by Volvo, e.g. whilst working with Ericsson. Anyway, this cooperation dates back to 2012 and is constantly being expanded.
Connected Vehicle Cloud (CVC) platform, as its producer named it, allows Volvo to „deliver scalably, secured, high-quality digital capabilities, including a full suite of automation, telematics, infotainment, navigation, and fleet management services to its vehicles. All software is able to be supported and seamlessly updated over-the-air (OTA) through the Ericsson CVC”.
Mazda x KDDI & Orange IoT

In 2020, connected car services also made their debut in Mazda, specifically the MX-30 model. Like the Swedish vehicle manufacturer, a local technology partner was also selected here. It was KDDI, the Japanese telecommunications tycoon. (Orange became a partner for the European market).
With Mazda's connection to the IoT cloud, the MyMazda App has also been developed. The manufacturer boasts that in this way they introduced a package of integrated services, "which will remove barriers between the car and the driver and provide a unique experience in using the vehicle". The IoT platform itself is geared to offer drivers a higher level of safety and comfort.
What counts is the specifics of your industry and flexibility of the platform
Regardless of which solution you choose, remember that security and data management are an absolute priority of any IoT platform. There is no one proven model because the automotive industry also has completely different vehicles, goals, and fleet scales.
Identify your key needs and make your final choice based on them. The IoT platform should be adjusted to your business, not the other way round. Otherwise, you will be in for constant software updates and potential problems with data management and its smooth monetization.
Building telematics-based insurance products of the future
Thanks to advancements in connected car technologies and the accessibility of personal mobile devices, insurers can roll out telematics-based services at scale. Utilizing telematics data opens the door to improving customer experience, unlocking new revenue streams, and increasing market competitiveness.
After reading this article, you will know:
- What is telematics
- How insurers build PAYD & PHYD products
- Why real-time crash detection is important
- How to identify stolen vehicles
- If it’s possible to streamline roadside assistance
- What role telematics plays in predictive maintenance
Telemetry- the early days
Obtaining vehicle data isn’t a new concept that has materialized with the evolution of the cloud and connectivity technologies. It is called telemetry and was possible for a long time but accessible only to the manufacturers or specialized parties because establishing the connection with the car was not an easy feat. As an example, it first started to be used by Formula 1 racing teams in the late 1980s, and all they could manage was very short bursts of data when the car was passing close to the pits. Also, the diversity and complexity of data were significantly different compared to what is available today because cars were less complex and had fewer sensors onboard that could gather and communicate data.
What is telematics?
At the very basic level, it’s a way of connecting to the vehicle data remotely. More specifically, telematics is a connection mechanism between machines (M2M) enabled by telecommunication advances. Telematics understood in the insurance context is even more specific and means connecting to the data generated by both the vehicle itself and the driver .
At first, when telematics-based products started gaining popularity, they required drivers to use additional devices like black boxes that needed to be installed in the car, sometimes by a qualified technician. These devices were either installed on the dashboard, under the bonnet, or plugged in the OBD-II connector. The black boxes were fairly simple devices that comprised of GPS, motion sensor, and a SIM card plus some basic software. They gathered rudimentary information about:
- the time-of-day customers drive
- the speed on different sorts of roads
- sharp braking and acceleration
- total mileage
- the total number of journeys
Meantime mobile apps mostly replaced black boxes as it didn’t take long for smartphones to get sophisticated enough to render them rather useless. Of course, they are still offered by the insurers as an alternative for customers that refuse to install apps that access their location or require one due to not having a sufficiently advanced mobile device. However, these days most of the cars that roll off the assembly line have built-in connectivity capabilities, so the telematics function is already embedded in the vehicle from the very beginning. As an example, 90% of Ford passenger cars starting from 2020 are connected. This means that there is no more need for additional devices. The car can now share all the data black boxes or apps gathered plus a lot of detailed data about the vehicle state from the massive amount of sensors they’ve got on board. More technologically advanced cars like Tesla can send up to 5 gigabytes of data every day.

Telematics-based insurance products and services
By employing new technologies, insurers can be closer to their customers, understand them better and take a more proactive approach to maintain the relationship. Telematics is the key technology that allows for this type of stance in the auto insurance area. Insurers can leverage telematics to build numerous products and services , but it is important to remember that the regulations can differ from state to state and from country to country.
So, the solutions depicted in this article should serve only as an example of how the technology can be used.
Usage-based products
Usage-based products are probably the most widespread in this category as they have been around for some time and offer the most tangible benefit to customers - cost savings.
The market value for these products is currently estimated at 20 billion dollars, and it is projected to reach 67 billion USD in the next 5 years. This is a good indicator that there is a growing demand in the market, especially from millennials and gen Zs who expect the services & products they buy to be tailored to them and not based on a generic quote.
Currently, the two main categories of usage-based insurance are Pay-how-you-drive (PHYD) and Pay-as-you-drive (PAYD) products. The first one is based on the assumption that the drivers should be rewarded for how they drive. So, when building PHYD offering, insurers need data on when & where their customers drive, the speed on different roads, how they accelerate, and brake, and how they enter corners. Feeding that data to Machine Learning algorithms allows assessing whether the customers are safe drivers who obey the law and to reward them with a discount on their premium. The customer benefits are clear, but the insurer benefits as well. By enabling their customers to use PHYD products, the insurers can:
- correct risk miscalculations,
- enhance price accuracy,
- attract favorable risks,
- retain profitable accounts,
- reduce claim costs
- enable lower premiums
The second category is the PAYD model in which the customers pay only for what they actually drive plus a low monthly rate. In this scenario, the insurers only need to monitor the miles driven and then multiply the amount by a fixed mile fee (a few cents usually). This type of solution is perfect for irregular drivers, and it was also a choice for many during COVID. It can increase insurance affordability, reduce uninsured driving, and provide consumer savings. It makes premiums more accurately reflect the claim costs of each individual motorist and rewards motorists who reduce their accident risk. Additionally, it can be a great alternative to PHYD products for customers who are not comfortable with gathering multiple data points about their driving behavior.
Real-time crash detection
This solution allows insurers to be closer to their customer and to react to events in real-time. It is a part of a larger trend in which the evolution of technology enables the shift from a mode of operations where the insurer is largely invisible to their customers (unless something happens) to a new model where the company is there to support and help the customers. And if possible, even go as far as to predict and prevent losses occur.
By analyzing the vehicle data and driver behavior, it is possible to detect accidents as they happen. Through monitoring the vehicle location, speed, and sensor data (in this case, motion sensor) and setting up alerts, insurers can be the first to know that there has been an accident. However, detecting the actual accident requires filtering out random shock and vibrations like speed bumps, rough roads, and potholes, parking on the kerb, doors, or boot lid being slammed.
This allows them to take a proactive approach and contact the driver, coordinate the emergency services, and roadside assistance. Using the data from the crash, they can also start the first notice of loss process and reconstruct the accident’s timeline. If it happens that there are more parties involved in the incident, the crash data can be used to determine who is responsible in ambiguous situations.
Stolen Vehicle Alerts
The big advantage of telematics-based products and services is that they are beneficial to both sides, and it’s easy to present. One of the examples can be enabling stolen vehicle alerts. By gathering data about customer behavior, insurers can build driver profiles that allow them to set up alerts that are triggered by unusual or suspicious behavior.
For instance, let’s assume a customer typically drives their car between 7am and 5pm on weekdays and then goes on various medium distance trips during the weekend. So an unexpected, high-speed journey at 3am on Wednesday can seem suspicious and trigger an alert. Of course, there can be unforeseen events that force customer behavior like that, but then the policyholder can be contacted to verify whether that’s them using the car and if there’s been an emergency. However, if the verification fails, then authorities can be notified and informed of the vehicle’s position in real-time to help recover the vehicle once it’s been confirmed as stolen.
For fleet owners, geo-fencing rules can be established to enhance fleet security. Many of the businesses with fleets operate during specific working hours. At night the company vehicles are parked in designated lots. So, if there is a situation when a vehicle leaves the specific area during the hours it shouldn’t, an automated alert can be triggered. The fleet manager can be then contacted to verify whether the car is being used by the company or if it’s leaving the property unauthorized. If necessary, authorities can be notified about the theft, and the vehicle location can be tracked to enable swift recovery.
Roadside assistance
Vehicle roadside assistance is a service that assists the driver of a vehicle in case of a breakdown. Vehicle roadside assistance is an effort by auto service professionals to sort minor mechanical and electrical repairs and adjustments in an attempt to make a vehicle drivable again. According to just a single roadside assistance company in the US, they receive 1.76 million calls for help a year, which translates to 5,000 calls every day. Clearly, any automation and expediting of the processes can have a significant impact on the effectiveness of operations and the customer experience.

By employing modern technologies like telematics, insurers can streamline the process from the moment the driver notifies the insurer of a breakdown. The company can start a full process aimed at resolving the issue as fast as possible in the least stressful way. Using vehicle location, a tow truck can be dispatched without the need for the customer to try and pinpoint their location. And the insurer can then proceed to locate and book the nearest available replacement vehicle. Furthermore, using the telematics data, an initial assessment of damage can be performed in order to expedite the repair. As an example, the data may indicate that the vehicle has been overheating for several miles before it stopped and that can be useful information for the garage that will try to fix the car.
Predictive maintenance
There are two types of servicing: reactive and proactive. While reactive requires managing a failure after it occurs, the various proactive maintenance approaches allow for some level of planning to address that failure ahead of time. Proactive maintenance enables better vehicle uptime and higher utilization, especially for fleet owners. Telematics is helping to further improve maintenance practices and optimize uptime on the path to predictive maintenance models.
This type of service is best suited for more modern vehicles where the telematics feature is embedded and there is a multitude of different sensors monitoring the vehicle’s health. However, a more basic level of predictive maintenance is achievable with plug-in telematics dongles and devices able to read fault codes.
Using that data, insurers can remind policyholders about things like oil and brake pad changes, which will have an impact on both road safety and vehicle longevity. They can also send alerts about issues like low tire pressure to encourage drivers to refill the tires with air on their own rather than wait for a puncture and require roadside assistance.
The simple preventive maintenance can ultimately save a lot of stress for the driver as it will prevent more severe issues with the car as well as money and time spent on the repairs. For fleet owners, it means increased uptime and better utilization of the vehicles that in turn lead to an increase in profit and lower costs.
Building Telematics-based Insurance Products - Summing Up
Aside from offering policyholders benefits like fairer, lower rates, streamlined claims resolution, and better roadside assistance, telematics technology is a goldmine of data for the insurers . They get a better understanding of driver behavior and associated risk and can adjust the premiums accordingly. In the event of an accident, an adjuster can find out which part of the car was damaged, how severe the impact was, and what is the probability of passengers suffering injuries. Finally, insurance companies can benefit from reduced administration costs by being able to resolve the claim faster and more efficiently.
Cybersecurity meets automotive business
The automotive industry is well known for its security standards regarding the road safety of vehicles. All processes regarding vehicle development - from drawing board to sales - were standardized and refined over the years. Both internal tests, as well as globally renowned companies like NHTSA or EuroNCAP, are working hard on making the vehicle safe in all road conditions - for both passengers and other participants of road traffic.
ISO/SAE 21434 - new automotive cybersecurity standard
Safety engineering is currently an important part of automotive engineering and safety standards, for example, ISO 26262 and IEC 61508. Techniques regarding safety assessment, like FTA (Fault Tree Analysis), or FMEA (Failure Mode and Effects Analysis) are also standardized and integrated into the vehicle development lifecycle.
With the advanced driver assistance systems starting to be a commodity, the set of tests started to quickly expand adapting to the market situation. Currently, EuroNCAP takes into account automatic emergency braking systems, lane assist, speed assistance, or adaptive cruise control. The overall security rating of the car highly depends on modern systems.
But the security is not limited to crash tests and driver safety. In parallel to the new ADAS systems, the connected car concept, remote access, and in general, vehicle connectivity moved forward. Secure access to the car does not only mean car keys but also network access and defense against cybersecurity threats.
And the threat is real. 6 years ago, in 2015, two security researchers hacked Jeep Cherokee driving 70mph on a highway by effectively disabling its breaks , changing the climate control and the infotainment screen display. The zero-day exploit allowing that is now fixed, but the situation immediately caught the public eye and changed the OEMs mindset from “minor, unrealistic possibility” to “very important topic”.
There was no common standard though. OEMs, Tier1s, and automotive software development companies worked hard to make sure this kind of situation never happens again.
A few years later other hackers proved that the first generation of Tesla Autopilot could be tricked to accelerate over the speed limit by only slightly changing the speed limit road sign. As a result, discussion about software-defined vehicles cybersecurity sparked again.
All of these resulted in the definition of the new standard called ISO 21434 “Road vehicles — cybersecurity engineering . The work started last year, but currently, it’s at the “Approval” phase, so we can quickly go through the most important topics it tackles.
In general, the new norm provides guidelines for including cybersecurity activities into processes through the whole vehicle lifecycle. The entire document structure is visualized below:
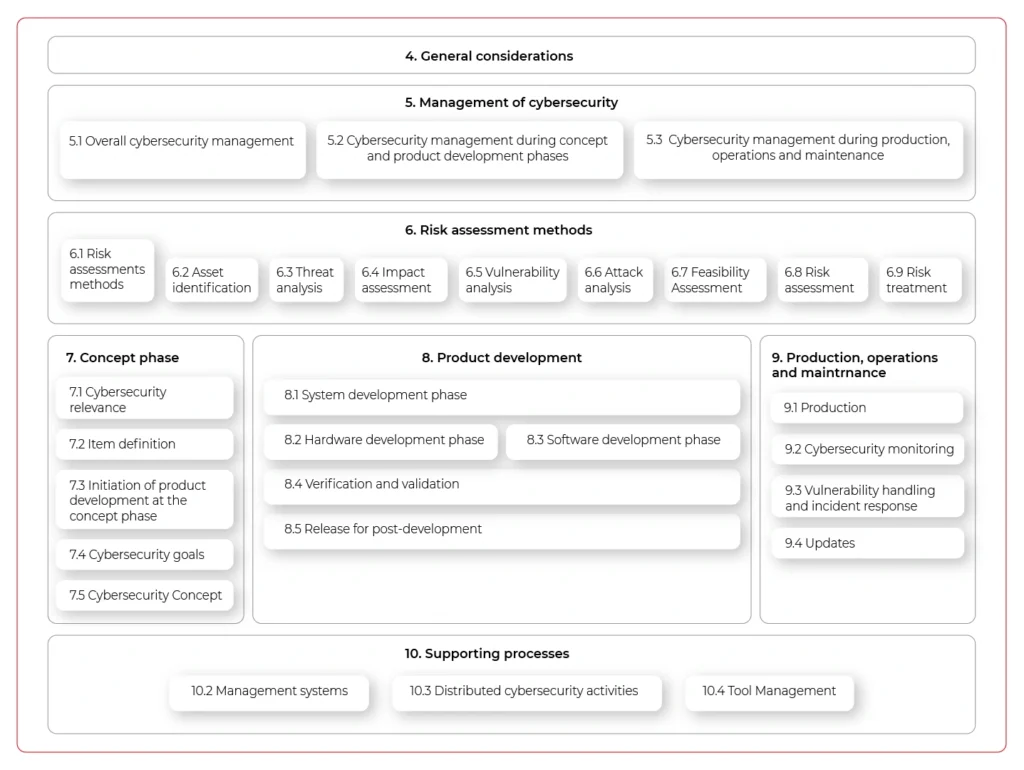
The important aspect of the new standard is that it does not only handle vehicle production but all activities until the vehicle is decommissioned - including incident response or software updates. It does not just focus on singular activities but highly encourages the continuous improvement of internal processes and standards.
The document also lists the best practices regarding cybersecurity design:
- Principle of least privilege
- Authentication and authorization
- Audit
- E2E security
- Architectural Trust Levels
- Segregation of interfaces
- Protection of Maintainability during service
- Testability during development (test interface) and operations10.
- Security by default
The requirements do not end on the architectural and design level. They can go as low as the hardware (identification of security-related elements, documentation, and verification for being safe, as they are potential entry points for hackers), and source code, where specific principles are also listed:
- The correct order of execution for subprograms and functions
- Interfaces consistency
- Data flow and control flow corrections
- Simplicity, readability, comprehensibility
- Robustness, verifiability, and suitability for modifications
The standard documentation is comprehensive, although clearly visible in the provided examples rather abstract and not specific to any programming languages, frameworks, and tools. There are recommendations, but it’s not intended to answer all questions, rather give a basis for further development. While not a panacea to all cybersecurity problems of the industry, we are now at the point when we need standardization and common ground for handling security threats in-vehicle software and connectivity, and the new ISO 21434 is a great start.
How to automate operationalization of Machine Learning apps - running first project using Metaflow
In the second article of the series, we guide you on how to run a simple project in an AWS environment using Metaflow. So, let’s get started.
Need an introduction to Metaflow? Here is our article covering basic facts and features .
Prerequisites
- Python 3
- Miniconda
- Active AWS subscription
Installation
To install Metaflow, just run in the terminal:
conda config --add channels conda-forge conda install -c conda-forge metaflow
and that's basically it. Alternatively, if you want to only use Python without conda type:
pip install metaflow
Set the following environmental variables related to your AWS account:
- AWS_ACCESS_KEY_ID
- AWS_SECRET_ACCESS_KEY
- AWS_DEFAULT_REGION
AWS Server-Side configuration
The separate documentation called “ Administrator's Guide to Metaflow “ explains in detail how to configure all the AWS resources needed to enable cloud scaling in Metaflow. The easier way is to use the CloudFormation template that deploys all the necessary infrastructure. The template can be found here . If for some reason, you can’t or don’t want to use the CloudFormation template, the documentation also provides detailed instructions on how to deploy necessary resources manually. It can be a difficult task for anyone who’s not familiar with AWS services so ask your administrator for help if you can. If not, then using the CloudFormation template is a much better option and in practice is not so scary.
AWS Client-Side configuration
The framework needs to be informed about the surrounding AWS services. Doing it is quite simple just run:
metaflow configure aws
in terminal. You will be prompted for various resource parameters like S3, Batch Job Queue, etc. This command explains in short what’s going on, which is really nice. All parameters will be stored under the ~/.metaflowconfig directory as a json file so you can modify it manually also. If you don’t know what should be the correct input for prompted variables, in the AWS console, go to CloudFormation -> Stacks -> YourStackName -> Output and check all required values there. The output of the stack formation will be available after the creation of your stack from the template as explained above. After that, we are ready to use Metaflow in the cloud!
Hello Metaflow
Let's write very simple Python code to see what boilerplate we need to create a minimal working example.
hello_metaflow.py
from metaflow import FlowSpec, step
class SimpleFlow(FlowSpec):
@step
def start(self):
print('Lets start the flow!')
self.message = 'start message'
print(self.message)
self.next(self.modify_message)
@step
def modify_message(self):
self.message = 'modified message'
print(self.message)
self.next(self.end)
@step
def end(self):
print('The class members are shared between all steps.')
print(self.message)
if __name__ == '__main__':
SimpleFlow()
The designers of Metaflow decided to apply an object-oriented approach. To create a flow, we must create a custom class that inherits from FlowSpec class. Each step in our pipeline is marked by @step decorator and basically is represented by a member function. Use self.next member function to specify the flow direction in the graph. As we mentioned before, this is a directed acyclic graph – no cycles are allowed, and the flow must go in one way, with no backward movement. Steps named start and end are required to define the endpoints of the graph. This code results in a graph with three nodes and two-edged.

It’s worth to note that when you assign anything to self in your flow, the object gets automatically persisted in S3 as a Metaflow artifact.
To run our hello world example, just type in the terminal:
python3 hello_metaflow.py run
Execution of the command above results in the following output:
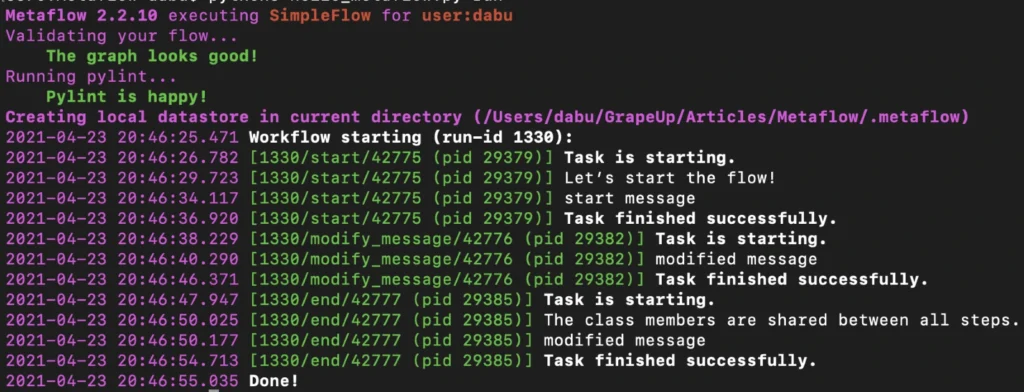
By default, Metaflow uses local mode . You may notice that in this mode, each step spawns a separate process with its own PID. Without much effort, we have obtained code that can be very easily paralleled on your personal computer.
To print the graph in the terminal, type the command below.
python3 hello_metaflow.py show
Let’s modify hello_metaflow.py script so that it imitates the training of the model.
hello_metaflow.py
from metaflow import FlowSpec, step, batch, catch, timeout, retry, namespace
from random import random
class SimpleFlow(FlowSpec):
@step
def start(self):
print('Let’s start the parallel training!')
self.parameters = [
'first set of parameters',
'second set of parameters',
'third set of parameters'
]
self.next(self.train, foreach='parameters')
@catch(var = 'error')
@timeout(seconds = 120)
@batch(cpu = 3, memory = 500)
@retry(times = 1)
@step
def train(self):
print(f'trained with {self.input}')
self.accuracy = random()
self.set_name = self.input
self.next(self.join)
@step
def join(self, inputs):
top_accuracy = 0
for input in inputs:
print(f'{input.set_name} accuracy: {input.accuracy}')
if input.accuracy > top_accuracy:
top_accuracy = input.accuracy
self.winner = input.set_name
self.winner_accuracy = input.accuracy
self.next(self.end)
@step
def end(self):
print(f'The winner is: {self.winner}, acc: {self.winner_accuracy}')
if __name__ == '__main__':
namespace('grapeup')
SimpleFlow()
The start step prepares three sets of parameters for our dummy training. The optional argument for each passed to the next function call splits our graph into three parallel nodes. Foreach executes parallel copies of the train step.
The train step is the essential part of this example. The @batch decorator sends out parallel computations to the AWS nodes in the cloud using the AWS Batch service. We can specify how many virtual CPU cores we need, or the amount of RAM required. This one line of Python code allows us to run heavy computations in parallel nodes in the cloud at a very large scale without much effort. Simple, isn't it?
The @catch decorator catches the exception and stores it in an error variable, and lets the execution continue. Errors can be handled in the next step. You can also enable retries for a step simply by adding @retry decorator. By default, there is no timeout for steps, so it potentially can cause an infinite loop. Metaflow provides a @timeout decorator to break computations if the time limit is exceeded.
When all parallel pieces of training in the cloud are complete, we merge the results in the join function. The best solution is selected and printed as the winner in the last step.
Namespaces is a really useful feature that helps keeping isolated different runs environments, for instance, production and development environments.
Below is the simplified output of our hybrid training.
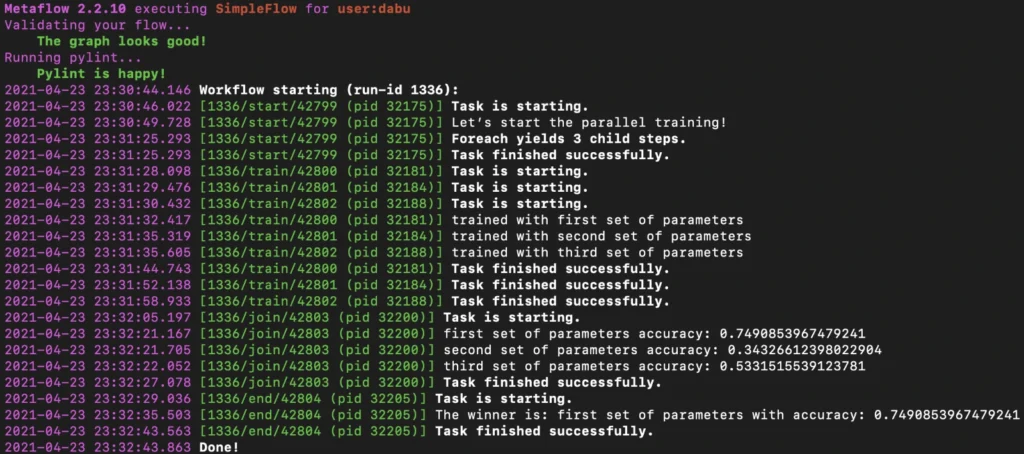
Obviously, there is an associated cost of sending computations to the cloud, but usually, it is not significant, and the benefits of such a solution are unquestionable.
Metaflow - Conclusions
In the second part of the article about Metaflow, we presented only a small part of the library's capabilities. We encourage you to read the documentation and other studies. We will only mention here some interesting and useful functionalities like passing parameters, conda virtual environments for a given step, client API, S3 data management, inspecting flow results with client API, debugging, workers and runs management, scheduling, notebooks, and many more. We hope this article has sparked your interest in Metaflow and will encourage you to explore this area further.

How to monetize car data - 3 strategies for companies and 28 practical use cases
Data is the currency of the 21st century. Those who have access to it can manage it wisely and draw constructive conclusions to get ahead and outperform the competition. The business model based on their monetization is no longer the domain strictly reserved for the Silicon Valley giants. Also, companies whose products and services are not directly related to data trading are trying their hand in this field. The automotive industry is one of the market sectors where data monetization will soon bring the greatest benefits. It is estimated that by 2030 it will be as much as $ 450-750 billion on a global scale.
In this article, you will learn:
What are the 4 megatrends to increase the amount of data from cars.
* Which technologies will enable better data downloading.
* Who can earn money from vehicle data monetization.
* What are the three main data monetization strategies.
* 28 practical use cases of how you can generate revenue.
The increase in revenues on this account is not only due to the electronics and sensors that are installed inside the vehicles. Social and cultural changes will also contribute to the increase in the amount of generated data - for example, the need to reduce city traffic and the search for ways of traveling alternative to vehicles with combustion engines.
Among the megatrends that will contribute to a greater inflow of data for monetization, the following are usually mentioned:
- electrification;
- connectivity;
- diverse mobility / shared mobility;
- and autonomous driving.
The trends that will transform the way we travel and use vehicles today are opportunities not only for OEMs (original equipment manufacturers), but also for insurance companies, fleet managers, toll providers, fuel retailers, and companies dealing with parking or traffic.
All these industries are increasingly joined by technologies that not only help to collect data but also to process it. The flow of information between these market sectors will enable the development of effective methods of obtaining data and creating new services that can be monetized.
In particular, it will be enabled due to the 8 developing technologies:
1. Big data analytics
2. High-speed data towers (5G)
3. Software platforms
4. Data cloud
5. High definition maps
6. High-resolution positioning (GPS)
7. Smart road infrastructure
8. V2X communication
Due to the extensive technological infrastructure, the amount of data that can be obtained from the vehicle will increase immeasurably with today's possibilities. It is estimated that in the near future, up to 10,000+ points from which data can be collected will be accessible in the car.
Understand the drivers and their needs
/„The challenge for industry players is that data will not be car-centric, but customer-centric.” – European premium OEM”/
While technology plays a key role in converting data into real currency, we should bear in mind one thing. In fact, the data is generated not by the vehicle, but by its user. It is the user’s attitude towards technology, privacy, and convenience that determines the success of obtaining information. Without their consent and willingness, there is no effective data monetization strategy.
As the examples of Google or Facebook show, the use of data without users' knowledge sooner or later ends in lawsuits, reluctance, and consumers turning their backs on the brand.
So how can you get users' consent to share data?
The answer is simple - although putting it into practice may be a real challenge - offer something in return. If you give something to the driver, they will share the data you care about the most.
Among the universal benefits on which you can build a strategy for obtaining data from drivers, the following are especially noteworthy:
- time savings,
- greater overall comfort and driving comfort,
- increased level of safety,
- reduction of vehicle operating costs,
- entertainment or increasing driving experience.
Research shows that drivers are much more willing to share data about the external environment of the vehicle - e.g., driving conditions, the technical condition of the vehicle, or even its location. However, they are not so eager to share data from their vehicle interior, e.g., the possibility of recording conversations. However, the percentage of such approvals increases dramatically, up to 60%, when drivers are offered more safety in return.
Younger customers and frequent travelers (who spend over 20 hours in their cars weekly) are also more open to this type of service - which results from their attitude to life, as well as personal needs. Differences in attitudes to privacy can also be shown in different markets (e.g., in Asia, Germany, or the USA). This is due to cultural differences, data regulations, and the technological advancement of a given region.
Regardless of where the company operates, in order to consider effective data monetization, you need to answer three key questions:
- WHO drives a given car?
- HOW do they behave behind the wheel?
- WHERE do they drive?
Understanding the consumer's needs and the way they travel is the starting point for developing an effective data monetization strategy. Only then can we choose the right tools and technologies enabling us to turn data into profits.
Monetizing car data - 28 practical use cases
Each case of data collection in a vehicle can potentially be turned into a benefit. It may concern one of the three areas:
- Generating revenue
- Reducing costs
- Increasing safety and security
Data monetization strategies can be based on only one of these assumptions or be a mix of activities from different areas. Let's have a look at the specific methods that are currently developing in the automotive market.
1. Generating revenue
Generating revenue from data in the automotive industry is frequently done by selling new functionalities and services. Usually (but not always), they are directly linked to the vehicle and are aimed at the driver ( direct monetization ).
Due to a large number of sensors and the fact that the car of the future will perfectly know and read the driver's needs, this type of vehicle is also perfect for being fitted with tailored advertising .
The third way of generating income can also be selling data to advertising companies that will use it to promote third-party brands. Obviously, this model causes the most distrust and reservations among the majority of consumers.
Direct monetization
1. Over-the-air-software add-ons / OTA
Do you want your car's operating system to be faster and more efficient? Or maybe you need to have it repaired, but you are too busy to visit your car dealer? Updating your software in the cloud will let you avoid stress and save you time. Analysts estimate that by 2022 automotive companies will have made about 100 million such vehicle updates annually.
2. Networked parking service
Being able to enter the car park without paying the traditional fee, and a suggestion where you can find a free space. Who wouldn't take advantage of such a convenience in congested cities, for a small surcharge or by providing the registration number of their own vehicle? The system of smart car parks connected to the network offers such possibilities.
3. Tracking/theft protection service
A car is often a valuable and indispensable resource for company activities (but also for private individuals). Vehicle theft does not only involve a financial loss but often logistics-related issues, too. Users increasingly often agree to share their location and modern tracking systems that will easily locate the vehicle in the event of theft.
4. Vehicle usage monitoring and scoring
Who wouldn't want to pay less for vehicle insurance or its rental? Systems monitoring drivers’ behavior while driving and evaluating them in line with the regulations may soon become the standard of services offered by insurers and rental companies.
5. Connected navigation service
Real-time road traffic updates, current fuel prices at nearby filling stations, possible parking options, access to repair stations or car wash - all that by means of voice commands and questions we ask our GPS while driving. For such convenience, most drivers will be delighted to share their data.
6. Onboard delivery of mobility-related content /services
7. Onboard platform to purchase non-driving related goods
Just as the phone is no longer used merely for telephone calls, the car increasingly often plays additional roles. Listening to music from the Internet or streaming videos by passengers (or by the driver, when the car is parked) is completely normal today. Soon we can expect that shopping from the driver's seat will also become the order of the day. And not necessarily only shopping for goods related to mobility and the car.
8. Usage-based tolling and taxation
Each road user and road infrastructure is subject to the same tax obligations and fees. Meanwhile, modern technology allows us to monitor how we use the infrastructure and how often we do it. There is an extensive group of drivers who could save a lot by sharing this type of data with road management.
9. „Gamified” / social like driving experience
“Tell me and I will forget, show me and I may remember; involve me and I will understand.” - Confucius said over 2,500 years ago, and nothing has changed since. Having fun, competing with friends, and having personal experience are still the strongest incentives for us to take new action. It also relates to our purchases.
10. Fleet management solution
Managing a fleet of vehicles, each in different locations, driven by a different driver, and carrying a different load is a real challenge. Unless the entire fleet is managed using one central platform that collects data from individual vehicles. Then everything is close at hand.
11. In-car hot-spot
Mobile internet onboard? Not only the driver who can update necessary data and stay in touch with the base (in the case of a fleet vehicle) will benefit, but also the passengers. In-car hot-spot is an ideal product for companies from the telecom industry, travel companies, insurers, and fleets.
Tailored advertising
12. Predictive maintenance
Advertising is not scared of any medium and, like a chameleon, it adjusts to the environment in which it appears. A car that, just like a smartphone, gets new functions every now and then, becomes an ideal place for such activities. Especially those messages that help drivers predict possible breakdowns and remind them about the upcoming service or oil change are highly appreciated.
13. Targeted advertisements and promotions
Apart from targeting advertisements in terms of the needs related to the vehicle operation, advertisers can also select ads based on who and where is driving the car, the driver's age, gender, or interests. Of course, the accuracy of targeting depends on the amount of data that can be obtained from the vehicle user. Drivers can therefore see displayed ads based on their current and past behavior and linked to the businesses and places featured on their route.
Selling data
Gathering vehicle data and selling it to third parties ? We only mention this point because, being experts, we feel it is our duty. As the previous and subsequent use cases show, there are many more creative ways, approved by drivers, that will allow them to benefit from car data.
2. Reducing costs
Data is a mine of information. Companies from the automotive industry can earn money not only by selling new products but also by enhancing existing solutions, reducing R&D costs, or offering cheaper services to users. Potentially, not only producers but also end users can benefit from data acquisition.
R&D and material costs reduction
14. Warranty costs reduction
Every year, companies from the automotive industry spend huge amounts of money on user warranty services. Data on how the vehicle is used, or what breaks down the most often can not only improve the service process itself and increase consumer satisfaction but also help make real savings in companies. Based on the analyzed information, it is possible to more precisely select the scope of warranty and its duration and even adjust it to specific users.
15. Traffic data based retail footprint and stock level optimization
By using advanced geospatial analysis, traditional stores and malls are capable of locating heavy-traffic areas. Wherever the number of vehicles and the frequency of trips increases, there is a potential for greater sales. It is also easier to plan and adjust the stock, expecting potential consumer interest. Companies from the automotive industry, which have data from vehicles, are a natural business partner for this submarket.
16. Data feedback based R&D optimization
Regardless of the sector in which we operate, the R&D department cannot exist without market feedback, looking for new trends and insights. In the automotive industry, continuous product optimization is the key to success. Data provided by managers is a constant source of inspiration and optimization that can contribute to a company's market position. Of course, provided that they are properly analyzed and used for new products.
Customers cost reduction
17. Usage-based insurance PAYD / PHYD
Switching from an insurance based on accident history to insurance based on date, time, and actual driving style? The advantages for the insurer do not need any explanation. For drivers who travel safely on the road and have nothing to be ashamed of, pay as you drive (PAYD) or pay how you drive (PHYD) insurance certainly has unquestionable benefits and is worth sacrificing a bit of privacy.
18. Driving style suggestions
Do you want to know how to drive more economically? How to adjust the speed to the road conditions or shorten the travel time? Systems installed in connected cars will be happy to help you with this. All you have to do is share information about how you are getting on behind the wheel.
19. E-hailing
24/7 availability, the possibility to order a ride from a location where there are no traditional taxis, the ease of paying via a mobile application. There are many advantages to using the services of brands such as Uber or Lyft. Although no one heard about these companies a few years ago, today they set trends related to our mobility . All due to the skillful use of data and the creation of a business model based on the driver and passenger benefit.
20. Carpooling
Fuel economy and pro-ecological trends increasingly contribute to our conscious use of vehicles. Instead of driving alone, we share travel costs increasingly often and invite other people to travel with us. The creation of applications and infrastructure based on consumer data, which will facilitate driver and passengers recognition, is an ideal model for companies from the automotive industry.
21. P2P car sharing
Your car is parked in the garage because you cycle daily or use public transport? Rent it to other drivers via the peer-to-peer platform and earn money. Of course, the company behind the mentioned application that connects both parties will also earn a few bobs on it, as that's what its business model is all about.
22. Trucks platooning
Connecting vehicles into convoys has existed as long as traffic. However, today's technology and data flow offer additional benefits. Trucks platooning is the creation of a convoy using communication technology and automated driving assistance systems. In such a convoy, one of the cars is the "leader", and the rest adapt to its actions, requiring no or little action from the drivers. Advantages for companies organizing a convoy? Lower Co2 emissions (up to 16% from the trailing vehicles and by up to 8% from the lead vehicle), better road safety, saving drivers time, and getting tasks done faster.
Improved customer satisfaction
23. Early recall detection and software updates
The data received from the vehicle enables early detection of faults and prevents unnecessary problems on the road, and even more - it allows to repair them remotely in the OTA (over-the-air) model. Thanks to such amenities, the driver does not have to download the required software or visit their authorized dealer in person to repair the vehicle.
3. Increasing safety and security
24. Driver’s condition monitoring service
Drowsiness and fatigue are some of the most common factors contributing to road accidents. Thanks to driver monitoring systems in the form of infrared sensors and a camera integrated into the steering wheel, the vehicle can warn the driver in advance and recognize symptoms that could lead to an accident or falling asleep at the wheel. This is one of the amenities that drivers most often agree on when it comes to sharing vehicle data.
25. Improved road/infrastructure maintenance and design
Analyzing data from vehicles can help both the drivers themselves and the road service. For instance, when cars regularly skid at some point - which is detected by ESP / ABS systems, road workers can introduce certain speed limits or improve the road profile. This type of data is also useful in planning road repairs when the renovation needs to be planned during less traffic volume.
26. Breakdown call service
Tyre pressure monitoring, battery and engine condition, fuel level, and electricity drops in the vehicle. Monitoring such data can prevent more than one accident, and should it happen, it helps the driver overcome the obstacles much faster. When roadside assistance knows where the driver is and what exactly happened to the car, it can react much faster or instruct the driver how to fix the problem.
27. Emergency call service
Data from connected cars can save not only our holidays but also our lives. When every second counts and the driver or other road users cannot call an ambulance or fire brigade, the connected car will do it for them. Thanks to the emergency call service option, the vehicle sends information about the location of the vehicle and its status to the appropriate services.
28. Road laws monitoring on enforcement
Data collected from vehicles - especially on a large scale - can tell a lot about the way a given group drives or about the compliance with the rules of the road. Providing data from your own vehicle to the traffic law monitoring services can improve our habits, reduce the number of road hogs and drunk drivers, and help adjust the law to new conditions.
Crucial factors in data monetization
The data stream generated by vehicles will increase year by year. In order to be well prepared for the monetization of this information and not to miss the opportunities for the automotive industry for additional sources of income, it is crucial to take care of several key issues.
- First of all : find a steadfast IT partner with experience in the field, who will supplement the competencies of the OEM with cloud solutions, AI, and building platforms based on data monitoring and analysis.
- Secondly : constantly create and test car products and services based on real needs and amenities for customers - which is inherently related to the next point.
- Thirdly : create an open policy for the management of customers’ data that rules out trading in confidential information or unclear or misleading regulations of data use.
Only the development of a business strategy based on all these assumptions can bring real benefits and help stand out from the competitors.
As you can see, this is not a simple and quick process to implement, as many entities are involved in it, and various interest groups may clash. So, is the game worth the candle? The answer is in the stories of telephone companies that used to believe that the telephone should only be used for making calls, and it did not have to be smart.
Whether we like it or not, vehicles are changing right before our very eyes and are increasingly often used not only for getting from A to B. People who do not understand it and do not see the opportunities facing the automotive industry may soon share the fate of the mobile giants from over a dozen years ago.
Machine Learning at the edge – federated learning in the automotive industry
Machine Learning combined with edge computing gains a lot of interest in industries leveraging AI at scale - healthcare, automotive, or insurance. The proliferation of use cases such as autonomous driving or augmented reality, requiring low latency, real-time response to operating correctly, made distributed data processing a tempting solution. Computation offloading to edge IoT devices makes the distributed cloud systems smaller - and in this case, smaller is cheaper. That’s the first most obvious benefit of moving machine learning from the cloud to edge devices.
Why is this article worth reading? See what we provide here:
- Explaining why regular ML training flow might not be enough.
- Presenting the idea behind federated learning.
- Describing the advantages and risks associated with this technology.
- Introducing technical architecture of a similar solution.
How can federated learning be used in the automotive industry?
Using the automotive industry as an example, modern cars already contain the edge device with processors capable of making complex computations. All ADAS (Advanced Driver Assistance Systems) and autonomous driving calculations happen on-board and require rather significant compute power. Detecting obstacles, road lanes, other vehicles, or road signs happens right now using onboard vehicle systems. That’s why collaboration with companies like Nvidia becomes crucial for OEMs, as the need for better onboard SoCs does not stop.
Even though the prediction happens in the vehicle, the model is trained and prepared using regular, complex, and costly training systems built on-premises or in the cloud. The training data grows bigger and bigger making the training process computationally expensive, slower, and requiring significant storage, especially if incremental learning is not used. The updated model may take time to be passed to the vehicle, and storing the user driving patterns, or even images from the onboard camera, requires both user consent and adherence to local law regulations.
The possible solution for that problem is using a local dataset from each vehicle as small, distributed training sets and training the model in the form of “federated learning”, where the local model is trained using smaller data batches and then aggregated into a singular global model. This is both more computational and memory efficient.
What are the benefits of federated learning?
One of the important concepts highly associated with machine learning at edge is building Federated Learning on top of edge ML. The combination of federated learning and edge computing gives important, measurable advantages:
- Reduced training time - edge devices calculate simultaneously which improves velocity compared to a monolithic system.
- Reduced inference time - compared to the cloud, at the edge inference results are calculated immediately.
- Collaborative learning - instead of single, huge training dataset learning happens simultaneously using smaller datasets - which makes it both easier and more accurate enabling bigger training sets.
- Always up-to-date model in vehicle - the new model is propagated to the vehicle after validation which makes the learning process of the network automatic.
- Exceptional privacy - the omnipresent problem of secure channels for passing sensitive user data, anonymization, and storing personal user data for training purposes is now gone. The learning happens on local data in the edge device, and the data never leaves the vehicle. The weights which are being shared cannot be used to identify the user or even his driving patterns.
- Lack of single point of failure - the data loss of the training set is not a threat.
Benefits from these concepts contain both cost savings and accuracy improved, visible as an overall better user experience when using the vehicle systems. As autonomous driving and ADAS systems are critical, better model accuracy is also directly associated with better security. For example, if the system can identify pedestrians on the road in front of vehicles with accuracy higher by 10%, it can mean that an additional 10% of collisions with pedestrians can be avoided. That is a measurable and important difference.
Of course, the solution does not come only with benefits. There are certain risks that have to be taken into account when deciding to transition to federated learning. The main one is that compared to the regular training mechanisms, federated learning is based on heterogeneous training data - disconnected datasets stored on edge devices. This means the global model accuracy is hard to control, as the global model is derived based on local models and changes dynamically.
This can be solved by building a hybrid solution, where part of the model is built using safe, predefined data, and it is gradually enhanced by federated learning. This brings both worlds closer together - amounts of data impossible to handle by a singular training system and stable model based on a verified training set.
Architectural overview
To build this kind of system, we need to start with the overall architecture. Key assumptions are that the infrastructure is capable of running distributed, microservices-based systems and has queueing and load balancing capabilities. Edge devices have some kind of storage, sensors, and SoC with CPU, and GPU capable of training the ML model .
Let’s split it into multiple subsystems and consider them one by one:
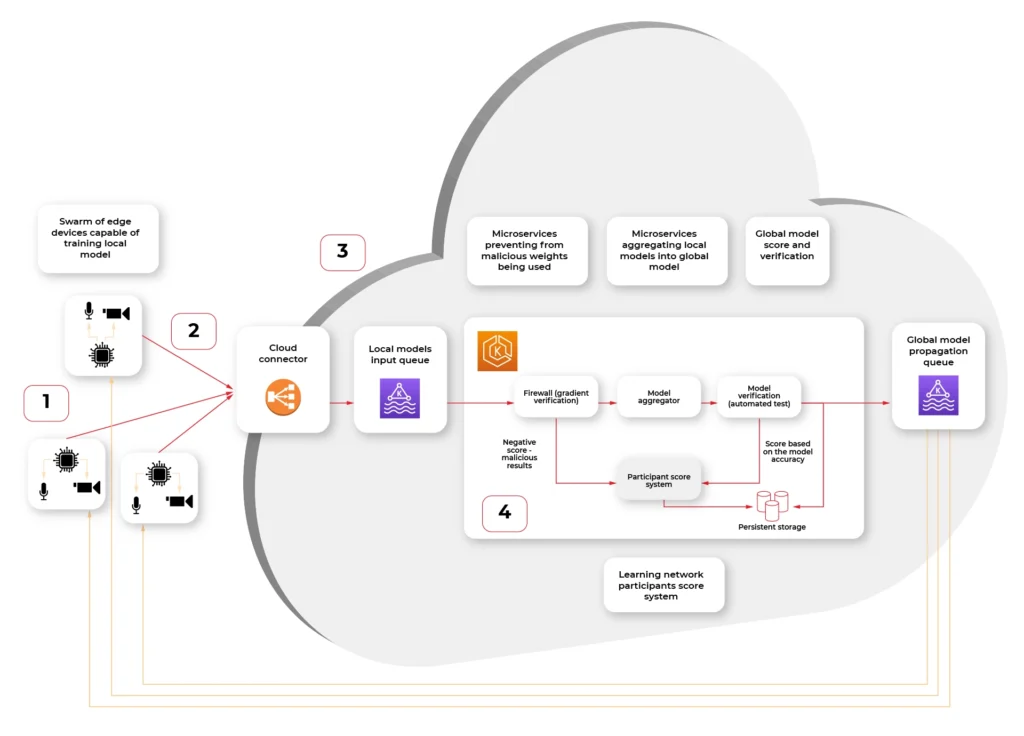
- Swarm of connected vehicle edge devices, each one with connected sensors and ability to recalculate model gradient (weights.)
- Connection medium, in this case fast, 5G network available in the car
- Cloud connector, being a secure, globally available public API where each of the vehicle IoT edge devices connect to.
- Kubernetes cluster with federated learning system split into multiple scalable microservices:
a) Gradient verification / Firewall - system rejecting the gradient that looks counterfeit - either manipulated by 3rd party or being based on fictional data.
b) Model aggregator - system merging the new weights into the existing model and creating an updated model.
c) Result verification automated test system - system verifying the new model on a predefined dataset with known predictions to score the model compared to the original.
d) Propagating queue connected to (S)OTA - automatic or triggered by user propagation of updated model in the form of an over-the-air update to the vehicle.
A firewall?
The firewall here, inside the system, is not a mistake. It is not guarding the network against attacks. It is guarding the model against being altered by cyber attacks.
Security is a very important aspect of AI, especially when the model can be altered by unverified data from the outside. There are multiple known attack vectors:
- Byzantine attack - regarding the situation, when some of the edge devices are compromised and uploading wrong weights. In our case, it is unlikely for the attacker to be omniscient (to know the data of all participants), so the uploaded weights are either randomized but plausible, like generated Gaussian noise, or flip-bit of result calculation. The goal is to make the model unpredictable.
- Model Poisoning - this attack is similar to the byzantine attack, but the goal is to inject the malicious model, which as a result alters the global model to misclassify objects. The dangerous example of such an attack is by injecting multiple fake vehicles into a model, which incorrectly identifies the trees as “stop” road signs. As a result, an autonomous car would not be able to operate correctly and stop near all trees as it would be a cross-section.
- Data Poisoning - this attack is the hardest to avoid and easiest to execute, as it does not require a vehicle to be compromised. The sensor, for example, camera, is fed with a fake picture, which contains minor, but present changes - for example, a set of bright green pixels, like on the picture:

This can be a printed picture or even a sticker on a regular road sign. If the network learns to treat those four pixels as a “stop” sign. This can be painted, for example, on another vehicle and cause havoc on the road when an autonomous car encounters this pattern.
As we can see, those attacks are specific to distributed learning systems or machine learning in general. Taking this into account is critical, as the malicious model may be impossible to identify by looking at the weights or even prediction results if the way of attack was not determined.
There are multiple countermeasures that can be used to mitigate those attacks. Median or distance to the global model can be calculated and quickly identify rogue data. The other defense is to check the score of the global model after merging and revert the change if the score is significantly worse.
In both cases, the notification about the situation should be notified, both to operators as a metric and to a service that gives scores to the vehicle edge devices. If the device gets repeatedly flagged as wrong-doing, it should be kicked out of the network, and investigation is required to figure out if this is a cyberattack and who is the attacker.
Model aggregation and test
As we know, taking care of the cybersecurity threats specific to our use case, now the important step is merging the new weights with the global model.
There is no one best function or algorithm that can be used to aggregate the local models into global models by merging the individual results (weights). In general, very often average, or weighted average gives sufficient results to start with.
The Aggregation step is not final. The versioned model is then tested in the next step using the predefined data with automated verification. This is a crucial part of the system, preventing the most obvious faults - like the lane assist system stopping to recognize roadside lines.
If the model passes the test with a score at least as good as the current model (or predefined value), it’s being saved.
Over-the-air propagation
The last step of the pipeline is enqueueing the updated model to be propagated back to vehicles. This can be either an automatic process as in continuous deployment directly to the car or may require a manual trigger if the system requires additional manual tests on the road.
A safe way of distributing the update is using the container image. The same image may be used for tests and then run in vehicles greatly reducing the chance of deploying failing updates. With this process, rollback is also simple as long as the device is able to store the previous version of the model.
The results
Moving from legacy, monolithic training method to federated learning gives promising results in both reduced overall system cost and improved accuracy. With quick expansion of 5G low-latency network and IoT edge devices into vehicles, this kind of system can move from theoretical discussions, scientific labs, and proofs of concepts to fully capable and robust production systems. The key part of building such a system is to consider the cybersecurity threats and crucial metrics like global model accuracy from the start.
8 examples of how AI drives the automotive industry
Just a few years ago, artificial intelligence stirred our imagination via the voice of Arnold Schwarzenegger from "Terminator" or agent Smith from "The Matrix". It wasn't long before the rebellious robots' film dialogue replaced the actual chats we have with Siri or Alexa over our morning cup of coffee. Nowadays, artificial intelligence is more and more boldly entering new areas of our lives. The automotive industry is one of those that are predicted to speed up in the coming years. By 2030, 95-98% of new vehicles are likely to use this technology.
What will you learn from this article?
- How to use AI in the production process
- How AI helps drivers to drive safely and comfortably
- How to use AI in vehicle servicing
- What companies from the AI industry should pay attention to if they want to introduce such innovations
- You will learn about interesting use cases of the major brands
Looking at the application of AI in various industries, we can name five stages of implementation of such solutions. Today, companies from the Communication Technology (ICT) and Financial Services ("Matured Industries") sectors are taking the lead. Healthcare, Retail, Life Science ("Aspirational Industries") are following closely behind. Food & Beverages and Agriculture ("Strugglers") and companies from the Chemicals and Oil and Gas sectors ("Beginners") are bringing up the rear. The middle of the bunch is the domain of Automotive and, partly related to it, Industrial Machinery.
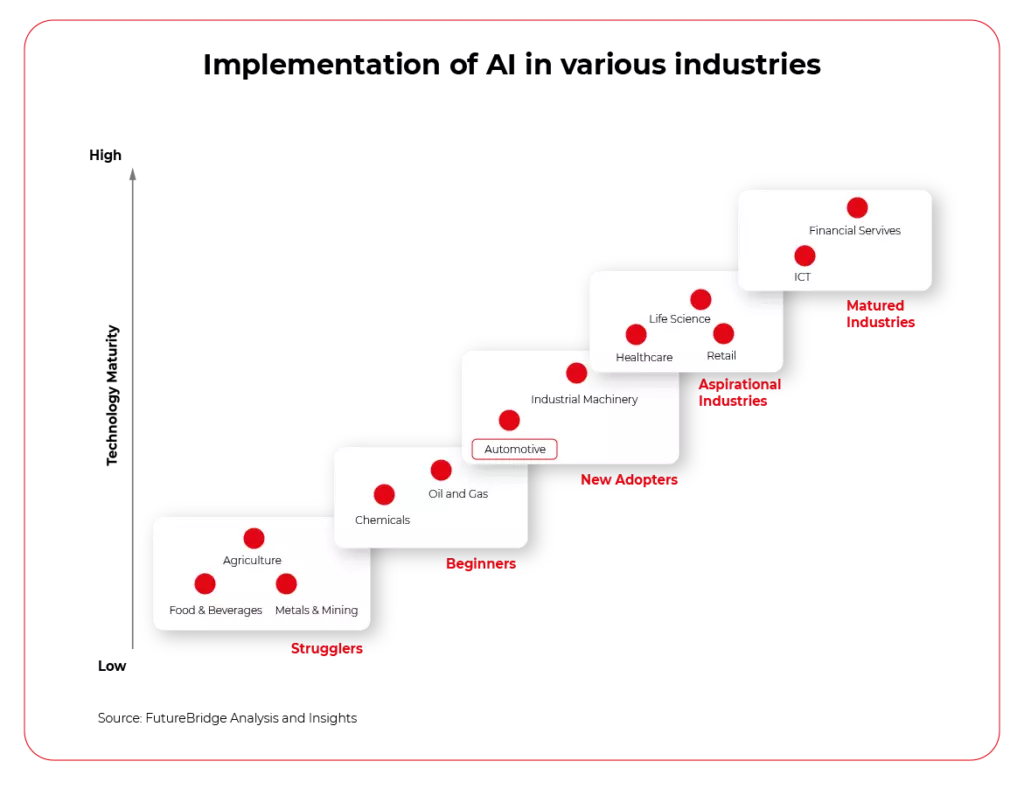
Although these days we choose a car mainly for its engine or design, it is estimated that over the next ten years, its software will be an equally significant factor that will impact our purchasing decision.
AI will not only change the way we use our vehicles, but also how we select, design, and manufacture them. Even now, leading brands avail of this type of technology at every stage of the product life cycle - from production through use, to maintenance and aftermarket.
Let's have a closer look at the benefits a vehicle manufacturing company can get when implementing AI in its operations.
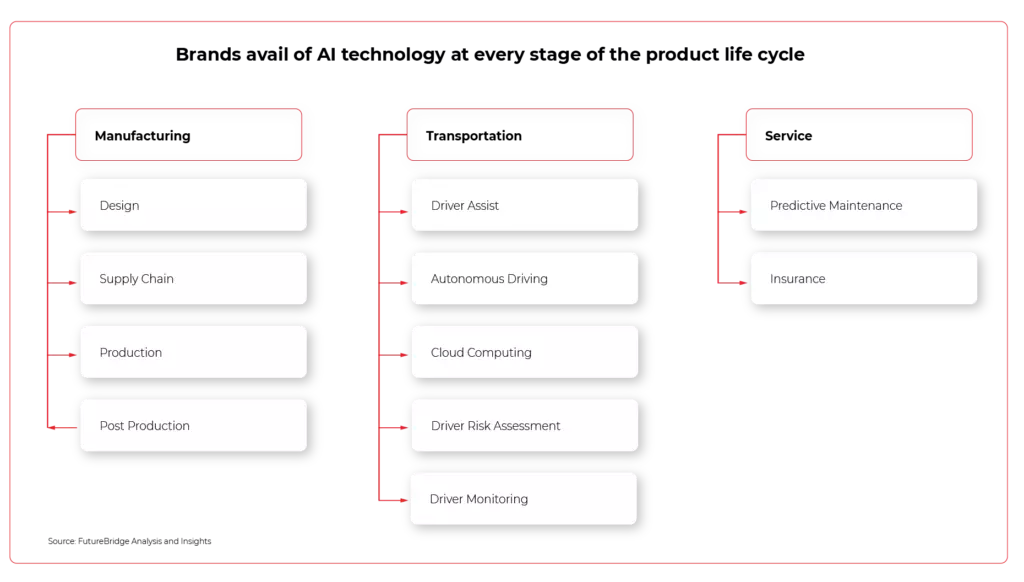
Manufacturing - how AI improves production
1. You will be able to work out complex operations and streamline supply chains
An average passenger car consists of around 30,000 separate parts, which interestingly enough, are usually ordered from various manufacturers in different regions of the world. If, on top of that, we add a complicated manufacturing process, increasingly difficult access to skilled workers and market dependencies, it becomes clear that potential delays or problems in the supply chain result in companies losing millions. Artificial intelligence can predict these complex interactions, automate processes, and prevent possible failures and mishaps
- Artificial intelligence complements Audi's supply chain monitoring. When awarding contracts, it is verified that the partners meet the requirements set out in the company's internal quality code. In 2020, over 13,000 suppliers provided the Volkswagen Group with a self-assessment of their own sustainability performance. Audi only works with companies that successfully pass this audit.
2. More efficient production due to intelligent co-robots working with people
For years, companies from the automotive industry have been trying to find ways to enhance work on the production line and increase efficiency in areas where people would get tired easily or be exposed to danger. Industrial robots have been present in car factories for a long time, but only artificial intelligence has allowed us to introduce a new generation of devices and their work in direct contact with people. AI-controlled co-bots move materials, perform tests, and package products making production much more effective.
- Hyundai Vest Exoskeleton (H-VEX) became a part of Kia Motors’ manufacturing process in 2018. It provides wearable robots for assembly lines. AI in this example helps in the overall production while sensing the work of human employees and adjusting their motions to help them avoid injuries.
- AVGs (Automated Guided Vehicles) can move materials around plants by themselves. They can identify objects in their path and adjust their route. In 2018, an OTTO Motors device carried a load of 750 kilograms in this way!
3. Quality control acquires a completely new quality
The power of artificial intelligence lies not only in analyzing huge amounts of data but also in the ability to learn and draw conclusions. This fact can be used by finding weak points in production, controlling the quality of car bodies, metal or painted surfaces, and also by monitoring machine overload and predicting possible failures. In this way, companies can prevent defective products from leaving the factories and avoid possible production downtime.
- Audi uses computer vision to find small cracks in the sheet metal in the vehicles. Thus, even at the production stage, it reduces the risk of damaged parts leaving the factory.
- Porsche has developed "Sounce", a digital assistant, using deep learning methods. AI is capable of reliably and accurately detecting noise, for example during endurance tests. This solution, in particular, takes the burden off development engineers who so far had to be present during such tests. Acoustic testing based on Artificial Intelligence (AI) increases quality and reduces production costs.
4. AI will configure your dream vehicle
In a competitive and excessively abundant market, selling vehicles is very difficult. Brands are constantly competing in services and technologies that are to provide buyers with new experiences and facilitate the purchasing process. Manufacturers use artificial intelligence services not only at the stage of prototyping and modeling vehicles, but also at the end of the manufacturing process, when the vehicle is eventually sold. A well-designed configurator based on AI algorithms is often the final argument, by which the customer is convinced to buy their dream vehicle. Especially when we are talking about luxury cars.
- The Porsche Car Configurator is nothing more than a recommendation engine powered by artificial intelligence. The luxury car manufacturer created it to allow customers to choose a vehicle from billions of possible options. The configurator works using several million data and over 270 machine learning modules. Effect? The customer chooses the vehicle of their dreams based on customised recommendations.
Transportation - how AI facilitates driving vehicles
5. Artificial intelligence will provide assistance in an emergency
A dangerous situation on the road, vehicle in the blind spot, power steering on a slippery surface. All those situations can be supported by artificial intelligence, which will calculate the appropriate driving parameters or correct the way the driver behaves on the road. Instead of making automatic decisions - which are often emotion-imbued or lack experience - brands increasingly hand them over to machines, thus reducing the number of accidents and protecting people's lives.
- Verizon Connect solutions for fleet management allow you to send speed prompts to your drivers as soon as your vehicle's wipers are turned on. This lets the driver know that they have to slow down due to adverse road conditions such as rain or snow. And the intelligent video recorder will help you understand the context of the accident - for instance, by informing you that the driver accelerated rapidly before the collision.
6. Driver monitoring and risk assessment increase driving safety and comfort
Car journeys may be exhausting. But not for artificial intelligence. The biggest brands are increasingly equipping vehicles with solutions aimed at monitoring fatigue and driver reaction time. By combining intelligent software with appropriate sensors, the manufacturer can fit the car with features that will significantly reduce the number of accidents on the road and discomfort from driving in difficult conditions.
- Tesla monitors the driver's eyes, thus checking the driver's level of fatigue and preventing them from falling asleep behind the wheel. It’s mainly used for the Autopilot system to prevent driver from taking short nap during travel.
- The BMW 3 Series is equipped with a personal assistant, the purpose of which is to improve driving safety and comfort. Are you tired of the journey? Ask for the "the vitalization program" that will brighten the interior, lower the temperature or select the right music. Are you cold? All you have to do is say the phrase "I'm cold" and the seats will be heated to the optimal temperature.
Maintenance - how AI helps you take care of your car
7. Predictive Maintenance prevents malfunctions before they even appear
Cars that we are driving today are already pretty smart. They can alert you whenever something needs your attention and they can pretty precisely say what they actually need – oil, checking the engine, lights etc. The Connected Car era however equipped with the possibilities given by AI brings a whole lot more – predictive maintenance. In this case AI monitors all the sensors within the car and is set to detect any potential problems even before they occur.
AI can easily spot any changes, which may indicate failure, long before it could affect the vehicle’s performance. To go even further with this idea, thanks to the Over-The-Air Update feature, after finding a bug that can be easily fixed by a system patch, such solution can be sent to the car Over-The-Air directly by the manufacturer without the need for the customer to visit the dealership.
- Predi (an AI software company from California) has created an intelligent platform that uses the service order history and data from the Internet of Things to prevent breakdowns and deal with new possible ones faster.
8. Insure your car directly from the cockpit
Driving a car is not only about operating costs and repairs, but also insurance that each of us is required to purchase. In this respect, AI can be useful not only for insurance companies ( see how AI can improve the claims handling process ), but also for drivers themselves. Thanks to the appropriate software, we will remember about expiring insurance or even buy it directly from the comfort of our car, without having to visit the insurer's website or a stationary point.
- The German company ACTINEO, specialising in personal injury insurance, processes and digitises 120,000. claims annually. Their ACTINEO Cockpit service is a digital manager that allows for the comprehensive management of this type of cases, control of billing costs, etc.
- In collaboration with Ford, Arity provides insurers - with the driver's consent, of course - data on the driving style of the vehicle owner. In return for sharing this information, the driver is offered personalised insurance that matches his driving style. The platform’s calculations are based on "more than 440 billion miles of historical driving data from more than 23 million active telematics connections and more than eight years of data directly from cars (source: Green Car Congress).
When will AI take over the automotive industry?
In 2015, it is estimated that only 5-10% of cars had some form of AI installed. The last five years have brought the dissemination of solutions such as parking assistance, driver assistance and cruise control. However, the real boom is likely to occur within the next 8-10 years.
From now on, artificial intelligence in the automotive industry will no longer be a novelty or wealthy buyers’ whims. The spread of the Internet of Things, consumer preferences and finding ways of saving money in the manufacturing process will simply force manufacturers to do this - not only in the vehicle cockpits, but also on the production and service lines.
To this end, they will be made to cooperate with manufacturers of sensors and ultrasonic solutions (cooperation between BMW and Mobileye, Daimler from Bosch or VW and Ford with Aurora) and IT companies providing software for AI. A dependable partner who understands the potential of AI and knows how to use its power to create the car of the future is the key to success for companies in this industry.