The next step for digital twin – virtual world


Digital Twin is a widely spread concept of creating a virtual representation of object state. The object may be small, like a raindrop, or huge as a factory. The goal is to simplify the operations on the object by creating a set of plain interfaces and limiting the amount of stored information. With a simple interface, the object can be easily manipulated and observed, while the state of its physical reflection is adjusted accordingly.
In the automotive and aerospace industries , this is a common approach to use virtual objects representation to design, develop, test, manufacture, and operate both parts of a vehicle, like an engine, drivetrain, chassis/fuselage, or a full vehicle – a whole car, motorcycle, truck or aircraft. Virtual representations are easier to experiment with, especially on a bigger scale, and to operate - especially in situations when connectivity between a vehicle and the cloud is not stable ability to query the state anyway is vital to provide a smooth user experience.
It’s not always critical to replicate the object with all details. For some use cases, like airflow modeling for calculating drag force, mainly exterior parts are important. For computer vision AI simulation, on the other hand, user checking if the doors and windows are locked only requires a boolean true/false state. And to simulate the combustion process in the engine, even the vehicle type is not important.
Today, artificial intelligence takes a significant role in a lot of car systems, to name a few: driver assistance, fatigue check, predictive maintenance, emergency braking, and collision avoidance, speed limit recognition, and prediction. Most of those systems do not live in a void - to operate correctly they require information about the surrounding world gathered through V2X connections, cameras, radars, lidars, GPS position, thermometers, or ABS/ESP sensors.
Let’s take Adaptive Cruise Control (ACC). The vehicle is kept in lane using computer vision and a front-facing camera. The distance to surrounding vehicles and obstacles is calculated using both a camera and a radar/lidar. Position on the map is gathered using GPS, and the speed limit is jointly calculated using the navigation system, road sign recognition, and distance to the vehicle ahead. This is an example of a complex system, which is hard to test - all parts of it have to be simulated separately, for example, by injecting a fake GPS path. Visualizing this kind of test system is complicated, and it’s hard to use data gathered from the car to reproduce the failure scenarios.
Here the Virtual World comes to help. The virtual world is an extension of the vehicle shadow concept where the multiple types of digital twins coexist in the same environment knowing their presence and interfaces. The system is composed of digital representation of physical assets whenever possible – including elements recognized via computer vision. Vehicles, road infrastructure, positioning systems, or even pedestrians are part of the virtual world. All vehicles are part of the same environment meaning they can share the data regarding the position of other traffic participants.

- Such a system provides multiple benefits: Improved accuracy of assistance systems, as the recognized infrastructure and traffic participants can come from other vehicles, and their position can be estimated even when they are still outside the range of sensors.
- Easier, more robust communication between infrastructure, vehicles, pedestrians, and cloud APIs as everything remains in the same digital system.
- Possibility to fully reproduce conditions of system failure as the state history of not just vehicle, but all of its surrounding remains in cloud and can be used to recreate and visualize the area.
- Ability to enhance existing systems leveraging data from the greater area - for example, immediately notifying about an obstacle on the road in 500 meters and suggestion to reduce speed.
- The extensive information set can be used to build new AI/ML applications, like real-time weather information (rain sensor) can be built to close sunroofs of vehicles parked in the area.
- The same system can be used to better simulate its behavior, even using data from real vehicles.
- Common interfaces allow for quicker implementation.
Obviously, there are also challenges - the amount of data to be stored is huge, so it should be heavily optimized, and storage has to be highly scalable. There is also an impact of the connection between the car and the cloud . Overall, the advantages overweight the disadvantages, and the Virtual World will be a common pattern in the next years with the growing implementation of software-defined vehicles and machine learning applications requiring more and more data to improve its operations.

Data powertrain in automotive: Complete end-to-end solution
We power your entire data journey, from signals to solutions
Check related articles
Read our blog and stay informed about the industry's latest trends and solutions.
What's next for the digital twin
Digital twins, or virtual copies of material objects, are being used in various types of simulations and the automotive industry is tapping into the potential offered by this technology. Representatives of this market can comprehensively monitor equipment and systems and prevent numerous failures. But what does the future hold for Digital Twin solutions, and who will play the leading role in their development in the years ahead?
The concept of Digital Twin today
To get started, let's have a few words of reminder. A virtual model called a digital twin is based on data from an actual physical object, equipped with special sensors. The collected information allows to the creation of a simulation of the object’s behavior in the real world, while testing takes place in virtual space.
The concept of Digital Twins is developing by leaps and bounds, with its origins dating back to 2003. For many years, more components have been added to this technology . Currently, we distinguish the following:
- digital (virtual) aspect,
- physical object,
- the connection between the two,
- data,
- services.
The last two were added to the classification by experts only in recent years. This was triggered by developments such as machine learning, Big Data , IoT, and cybersecurity technologies.
Capabilities of digital twins in automotive
Digital twins are excelling in many fields when it comes to working on high-tech cars, especially those connected to the network. Below are selected areas of influence.
Designing the vehicle
3D modeling is a way of designing that has been around for many years in the widespread automotive manufacturing industry. But this one is not standing still, and the growing popularity of digital twins is proof of that. Digital replicas extend the concept of physical 3D modeling to virtual representations of software, interactive systems, and usage simulations. As such, they take the conceptual process to a higher level of sophistication.
Production stage
Design is not everything. In fact, the technology mentioned above also works well at the production stage . First and foremost, DT's solutions facilitate control over advanced manufacturing techniques. Since virtual twins improve real-time monitoring and management of facilities, they support the construction of increasingly complex products.
Besides, the safety of the work itself during the production of cars and parts adds to the issue. By simulating manufacturing processes , digital twins contribute to the creation of appropriate employment conditions.
Advanced event prediction
Virtual copies have the ability to simulate the physical state of a vehicle and thus predict the future. Predictive maintenance in this case is based on such reliable data as temperature, route, engine condition, or driver behavior. This can be used to ensure optimal vehicle performance.
Aspects of cyber security
DT predicted for automotive software can help simulate the risk of data theft or other cybersecurity threats. The digital twin of the whole Datacenter can be created to simulate different attack vectors. Continuous software monitoring is also helpful in the early detection of vulnerabilities to hacking attacks (and more)
Development of security-improving systems
Virtual replicas of vehicles and the real world also enable the prediction of specific driving situations and potential vehicle responses. This is valuable knowledge that can be used, for example, to further develop ADAS systems such as electronic stability control and autonomous driving. This is all aimed at ensuring safer, faster, and more economical driving.
How will the digital twin trend evolve in the coming years?
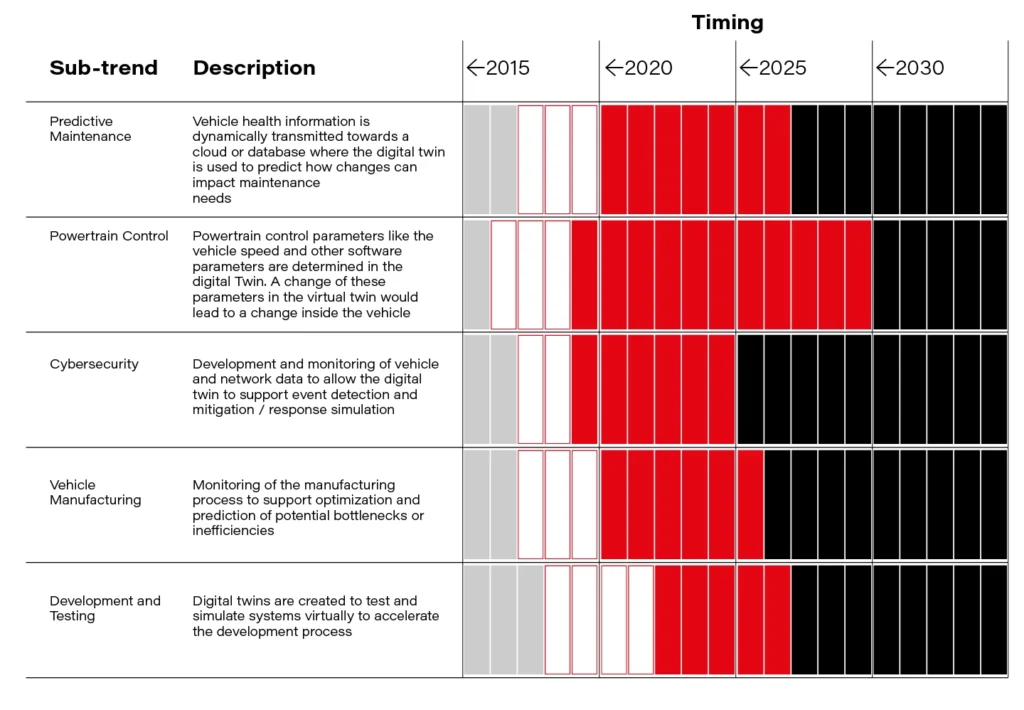
One of the leading trend analysis companies from the automotive world has developed its own prediction of the development of specific sub-trends within the scope of the digital twin. In this regard, the experts analyzed such areas of development as:
- Predictive Maintenance.
- Powertrain Control (e.g. vehicle speed and other software parameters).
- Cybersecurity.
- Vehicle Manufacturing.
- Development and Testing.
The analysis shows that all of the above issues will move into the mainstream in the third decade of the 21st century. On the other hand, some of them will develop at a slower pace in the years to come, while others will develop at a slightly higher rate.
Subtrend Powertrain Control will have a lot to say. As early as around 2025, we will see that basic control parameters will be defined and tested primarily in the digital twin.
To a lesser extent, but still, Development and Testing solutions will also be implemented. DTs will be created to simulate systems in such a way as to accelerate development processes. The same will be true in the area of Predictive Maintenance. Vehicle condition information will soon be sent in bulk to the cloud or database. There, a virtual copy will be used to predict how certain changes will affect maintenance needs.
Key players in DT development in automotive
The market is already witnessing the emergence of brands that will push (with varying intensity) DT technology in the broader automotive sector (cars, software, parts). Specifically standing out in this regard are:
- Tesla,
- BOSCH,
- SIEMENS,
- Porsche,
- Volkswagen,
- Continental.
Both OEMs and Suppliers will shift their focus to the Development and Testing area. The proportions are somewhat different in the case of Vehicle Manufacturing, as this slice of the pie tends to go to OEMs for the time being. However, it is possible that parts manufacturers will also get their share before long. On the other hand, without any doubt, the area of Cybersecurity already belongs to OEMs , and the percentage of such companies that use DT to improve cybersecurity is prevalent.
The digital twin and the future of automotive brands
The digital twin is a solution that helps address mature challenges specific to the entire modern automotive industry. It supports digitization processes and data-driven decision-making. Manufacturers can apply this technology at all stages of the production process, thus eliminating potential abnormalities.
In the upcoming years, we can expect DT-type applications to become more common, especially among OEMs.
So what are brands supposed to do if they want to secure a significant position in a market where the DM trend is becoming highly relevant? First, it's a good idea if they collaborate with those driving change. Second, it' s worth adopting a specific strategy, as not every sub-trend needs to be addressed in every scenario. This is brilliantly illustrated in the SBD chart below. The authors of this chart recommend certain behaviors, breaking them down into specific categories and relating them to specific market participants.
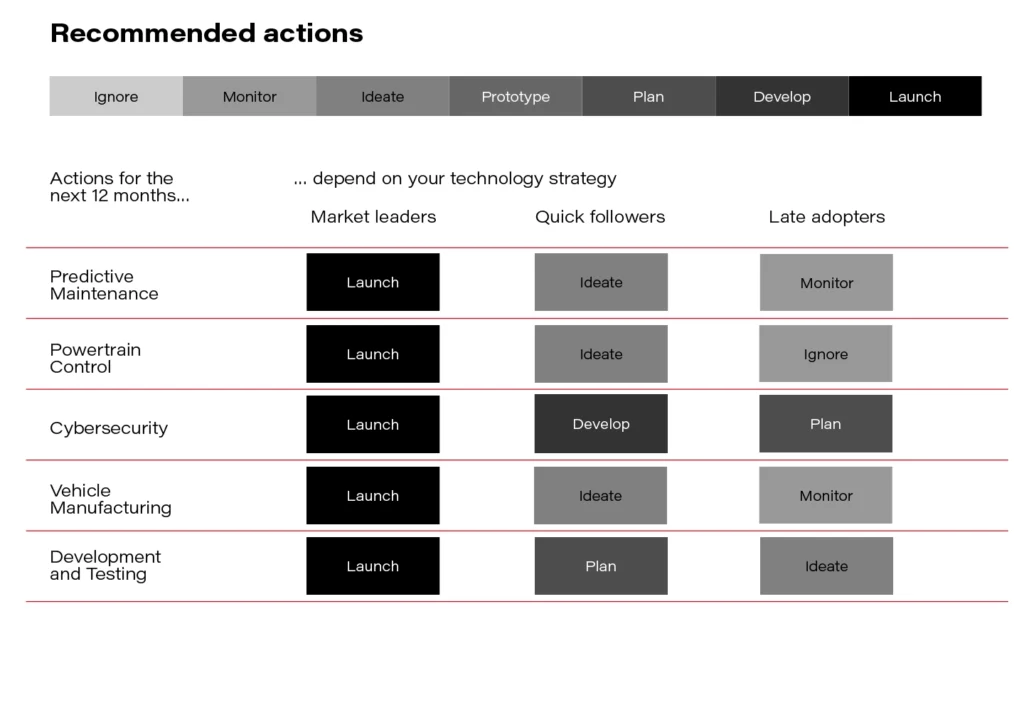
Based on this overview, it's good to see that the leaders don't have too much choice, and over the next 12 months, they should be releasing solutions that fall into every sub-trend. The issue of cyber security is becoming essential as well . The digital twins have great potential in developing it, so basically all stakeholders should focus on this area.
Interested in our services?
Reach out for tailored solutions and expert guidance.