Thinking out loud
Where we share the insights, questions, and observations that shape our approach.
How to design the LLM Hub Platform for enterprises
In today's fast-paced digital landscape, businesses constantly seek ways to boost efficiency and cut costs. With the rising demand for seamless customer interactions and smoother internal processes, large corporations are turning to innovative solutions like chatbots. These AI-driven tools hold the potential to revolutionize operations, but their implementation isn't always straightforward.
The rapid advancements in AI technology make it challenging to predict future developments. For example, consider the differences in image generation technology that occurred over just two years:

Source: https://medium.com/@junehao/comparing-ai-generated-images-two-years-apart-2022-vs-2024-6c3c4670b905
Find more examples in this blog post .
This text explores the requirements for an LLM Hub platform, highlighting how it can address implementation challenges, including the rapid development of AI solutions, and unlock new opportunities for innovation and efficiency. Understanding the importance of a well-designed LLM Hub platform empowers businesses to make informed decisions about their chatbot initiatives and embark on a confident path toward digital transformation.
Key benefits of implementing chatbots
Several factors fuel the desire for easy and affordable chatbot solutions.
- Firstly, businesses recognize the potential of chatbots to improve customer service by providing 24/7 support, handling routine inquiries, and reducing wait times.
- Secondly, chatbots can automate repetitive tasks , freeing up human employees for more complex and creative work.
- Finally, chatbots can boost operational efficiency by streamlining processes across various departments, from customer service to HR.
However, deploying and managing chatbots across diverse departments and functions can be complex and challenging. Integrating chatbots with existing systems, ensuring they understand and respond accurately to a wide range of inquiries, and maintaining them with regular updates requires significant technical expertise and resources.
This is where LLM Hubs come into play.
What is an LLM Hub?
An LLM Hub is a centralized platform designed to simplify the deployment and management of multiple chatbots within an organization. It provides a single interface to oversee various AI-driven tools, ensuring they work seamlessly together. By centralizing these functions, an LLM Hub makes implementing updates, maintaining security standards, and managing data sources easier.
This centralization allows for consistent and efficient management, reducing the complexity and cost associated with deploying and maintaining chatbot solutions across different departments and functions.
Why does your organization need an LLM Hub?
The need for such solutions is clear. Without the adoption of AI tools, businesses risk falling behind quickly. Furthermore, if companies neglect to manage AI usage, employees might use AI tools independently, leading to potential data leaks. One example of this risk is described in an article detailing leaked conversations using ChatGPT, where sensitive information, including system login credentials, was exposed during a system troubleshooting session at a pharmacy drug portal.
Cost is another critical factor. The affordability of deploying chatbots at scale depends on licensing fees, infrastructure costs, and maintenance expenses. A comprehensive LLM Hub platform that is both cost-effective and scalable allows businesses to adopt chatbot technology with minimal financial risk.
Considerations for the LLM Hub implementation
However, achieving this requires careful planning. Let’s consider, for example, data security . To provide answers tailored to employees and potential customers, we need to integrate the models with extensive data sources. These data sources can be vast, and there is a significant risk of inadvertently revealing more information than intended. The weakest link in any company's security chain is often human error, and the same applies to chatbots. They can make mistakes, and end users may exploit these vulnerabilities through clever manipulation techniques.
We can implement robust tools to monitor and control the information being sent to users. This capability can be applied to every chatbot assistant within our ecosystem, ensuring that sensitive data is protected. The security tools we use - including encryption, authentication mechanisms, and role-based access control - can be easily implemented and tailored for each assistant in our LLM Hub or configured centrally for the entire Hub, depending on the specific needs and policies of the organization.
As mentioned, deploying, and managing chatbots across diverse departments and functions can also be complex and challenging. Efficient development is crucial for organizations seeking to stay compliant with regulatory requirements and internal policies while maximizing operational effectiveness. This requires utilizing standardized templates or blueprints within an LLM Hub, which not only accelerates development but also ensures consistency and compliance across all chatbots.
Additionally, LLM Hubs offer robust tools for compliance management and control, enabling organizations to monitor and enforce regulatory standards, access controls, and data protection measures seamlessly. These features play a pivotal role in reducing the complexity and cost associated with deploying and maintaining chatbot solutions while simultaneously safeguarding sensitive data and mitigating compliance risks.

In the following chapter, we will delve into the specific technical requirements necessary for the successful implementation of an LLM Hub platform, addressing the challenges and opportunities it presents.
LLM Hub - technical requirements
Several key technical requirements must be met to ensure that LLM Hub functions effectively within the organization's AI ecosystem. These requirements focus on data integration, adaptability, integration methods, and security measures . For this use case, 4 major requirements were set based on the business problem we want to solve.
- Independent Integration of Internal Data Sources: The LLM Hub should seamlessly integrate with the organization's existing data sources. This ensures that data from different departments or sources within the organization can be seamlessly incorporated into the LLM Hub. It enables the creation of chatbots that leverage valuable internal data, regardless of the specific chatbot's function. Data owners can deliver data sources, which promotes flexibility and scalability for diverse use cases.
- Easy Onboarding of New Use Cases: The LLM Hub should streamline the process of adding new chatbots and functionalities. Ideally, the system should allow the creation of reusable solutions and data tools. This means the ability to quickly create a chatbot and plug in data tools, such as internal data sources or web search functionalities into it. This reusability minimizes development time and resources required for each new chatbot, accelerating AI deployment.
- Security Verification Layer for the Entire Platform: Security is paramount in LLM-Hub development when dealing with sensitive data and infinite user interactions. The LLM Hub must be equipped with robust security measures to protect user privacy and prevent unauthorized access or malicious activities. Additionally, a question-answer verification layer must be implemented to ensure the accuracy and reliability of the information provided by the chatbots.
- Possibility of Various Integrations with the Assistant Itself: The LLM Hub should offer diverse integration options for AI assistants. Interaction between users and chatbots within the Hub should be available regardless of the communication platform. Whether users prefer to engage via an API, a messaging platform like Microsoft Teams, or a web-based interface, the LLM Hub should accommodate diverse integration options to meet user preferences and operational needs.
High-level design of the LLM Hub
A well-designed LLM Hub platform is key to unlocking the true potential of chatbots within an organization. However, building such a platform requires careful consideration of various technical requirements. In the previous section, we outlined four key requirements. Now, we will take an iterative approach to unveil the LLM Hub architecture.
Data sources integration
Figure 1

The architectural diagram in Figure 1 displays a design that prioritizes independent integration of internal data sources. Let us break down the key components and how they contribute to achieving the goal:
- Domain Knowledge Storage (DKS) – knowledge storage acts as a central repository for all the data extracted from the internal source. Here, the data is organized using a standardized schema for all domain knowledge storages. This schema defines the structure and meaning of the data (metadata), making it easier for chatbots to understand and query the information they need regardless of the original source.
- Data Loaders – data loaders act as bridges between the LLM Hub and specific data sources within the organization. Each loader can be configured and created independently using its native protocols (APIs, events, etc.), resulting in structured knowledge in DKS. This ensures that LLM Hub can integrate with a wide variety of data sources without requiring significant modifications in the assistant. Data Loaders, along with DKS, can be provided by data owners who are experts in the given domain.
- Assistant – represents a chatbot that can be built using the LLM Hub platform. It uses the RAG approach, getting knowledge from different DKSs to understand the topic and answer user questions. It is the only piece of architecture where use case owners can make some changes like prompt engineering, caching, etc.
Functions
Figure 2 introduces pre-built functions that can be used for any assistant. It enables easier onboarding for new use cases . Functions can be treated as reusable building blocks for chatbot development . Assistants can easily enable and disable specific functions using configuration.
They can also facilitate knowledge sharing and collaboration within an organization. Users can share functions they have created, allowing others to leverage them and accelerate chatbot development efforts.
Using pre-built functions, developers can focus on each chatbot's unique logic and user interface rather than re-inventing the wheel for common functionalities like internet search. Also, using function calling, LLM can decide whether specific data knowledge storage should be called or not, optimizing the RAG process, reducing costs, and minimizing unnecessary calls to external resources.
Figure 2

Middleware
With the next diagram (Figure 3), we introduce an additional layer of middleware, a crucial enhancement that fortifies our software by incorporating a unified authentication process and a prompt validation layer. This middleware acts as a gatekeeper , ensuring that all requests meet our security and compliance standards before proceeding further into the system.
When a user sends a request, the middleware's authentication module verifies the user's credentials to ensure they have the necessary permissions to access the requested resources. This step is vital in maintaining the integrity and security of our system, protecting sensitive data, and preventing unauthorized access. By implementing a robust authentication mechanism, we safeguard our infrastructure from potential breaches and ensure that only legitimate users interact with our assistants.
Next, the prompt validation layer comes into play. This component is designed to scrutinize each incoming request to ensure it complies with company policies and guidelines. Given the sophisticated nature of modern AI models, there are numerous ways to craft queries that could potentially extract sensitive or unauthorized information. For instance, as highlighted in a recent study , there are methods to extract training data through well-constructed queries. By validating prompts before they reach the AI model, we mitigate these risks, ensuring that the data processed is both safe and appropriate.
Figure 3

The middleware, comprising the authentication (Auth) and Prompt Verification Layer, acts as a gatekeeper to ensure secure and valid interactions. The authentication module verifies user credentials, while the Prompt Verification Layer ensures that incoming requests are appropriate and within the scope of the AI model's capabilities. This dual-layer security approach not only safeguards the system but also ensures that users receive relevant and accurate responses.
Adaptability is the key here. It is designed to be a common component for all our assistants, providing a standardized approach to security and compliance. This uniformity simplifies maintenance, as updates to the authentication or validation processes can be implemented across the board without needing to modify each assistant individually. Furthermore, this modular design allows for easy expansion and customization, enabling us to tailor the solution to meet the specific needs of different customers.
This means a more reliable and secure system that can adapt to their unique requirements. Whether you need to integrate new authentication protocols, enforce stricter compliance rules, or scale the system to accommodate more users, our middleware framework is flexible enough to handle these changes seamlessly.
Handlers
We are coming to the very beginning of our process: the handlers. Figure 4 highlights the crucial role of these components in managing requests from various sources . Users can interact through different communication platforms, including popular ones in office environments such as Teams and Slack. These platforms are familiar to employees, as they use them daily for communication with colleagues.
Handling prompts from multiple sources can be complex due to the variations in how each platform structures requests. This is where our handlers play a critical role.
They are designed to parse incoming requests and convert them into a standardized format , ensuring consistency in responses regardless of the communication platform used. By developing robust handlers, we ensure that the AI model provides uniform answers across all communicators, thereby enhancing reliability and user experience.
Moreover, these handlers streamline the integration process, allowing for easy scalability as new communication platforms are adopted. This flexibility is essential for adapting to the evolving technological landscape and maintaining a cohesive user experience across various channels.
The API handler facilitates the creation of custom, tailored front-end interfaces . This capability allows the company to deliver unique and personalized chat experiences that are adaptable to various scenarios.
For example, front-end developers can leverage the API handler to implement a mobile version of the chatbot or enable interactions with the AI model within a car. With comprehensive documentation, the API handler provides an effective solution for developing and integrating these features seamlessly.
In summary, the handlers are a foundational element of our AI infrastructure, ensuring seamless communication, robust security, and scalability. By standardizing requests and enabling versatile front-end integrations, they provide a consistent and high-quality user experience across various communication platforms.
Figure 4

Conclusions
The development of the LLM Hub platform is a significant step forward in adopting AI technology within large organizations. It effectively addresses the complexities and challenges of implementing chatbots in an easy, fast, and cost-effective way. But to maximize the potential of LLM Hub, architecture is not enough, and several key factors must be considered:
- Continuous Collaboration: Collaboration between data owners, use case owners, and the platform team is essential for the platform to stay at the forefront of AI innovation.
- Compliance and Control: In the corporate world, robust compliance measures must be implemented to ensure the chatbots adhere to industry and organizational standards. LLM Hub can be a perfect place for it. It can implement granular access controls, audit trails, logging, or policy enforcements.
- Templates for Efficiency: LLM Hub should provide customizable templates for all chatbot components that can be used in a new use case. Facilitating templates will help teams accelerate the creation and deployment of new assistants, improving efficiency and reducing time to market.
By adhering to these rules, organizations can unlock new ways for growth, efficiency, and innovation in the era of artificial intelligence. Investing in a well-designed LLM Hub platform equips corporations with the chatbot tools to:
- Simplify Compliance: LLM Hub ensures that chatbots created in the platform adhere to industry regulations and standards, safeguarding your company from legal implications and maintaining a positive brand name.
- Enhance Security : Security measures built into the platform foster trust among all customers and partners, safeguarding sensitive data and the organization's intellectual property.
- Accelerate chatbot development : Templates and tools provided by LLM Hub, or other use case owners enhance quickly development and launch of sophisticated chatbots.
- Asynchronous Collaboration and Work Reduction: An LLM Hub enables teams to work asynchronously on chatbot development, eliminating the need to duplicate efforts, e.g., to create a connection to the same data source or make the same action.
As AI technology continues to evolve, the potential applications of LLM Hubs will expand, opening new opportunities for innovation. Organizations can leverage this technology to not only enhance customer interactions but also to streamline internal processes, improve decision-making, and foster a culture of continuous improvement. By integrating advanced analytics and machine learning capabilities, the LLM Hub can provide deeper insights and predictive capabilities, driving proactive business strategies.
Furthermore, the modularity and scalability of the LLM Hub platform means that it can grow alongside the organization, adapting to changing needs without requiring extensive overhauls. Specifically, this growth potential translates to the ability to seamlessly integrate new tools and functionalities into the entire LLM Hub ecosystem. Additionally, new chatbots can be simply added to the platform and use already implemented tools as the organization expands. This future-proof design ensures that investments made today will continue to yield benefits in the long run.
The successful implementation of an LLM Hub can transform the organizational landscape, making AI an integral part of the business ecosystem. This transformation enhances operational efficiency and positions the organization as a leader in technological innovation, ready to meet future challenges and opportunities.


Controlling HVAC module in cars using Android: A dive into SOME/IP integration
In modern automotive design, controlling various components of a vehicle via mobile devices has become a significant trend, enhancing user experience and convenience. One such component is the HVAC (Heating, Ventilation, and Air Conditioning) system, which plays a crucial role in ensuring passenger comfort. In this article, we'll explore how to control the HVAC module in a car using an Android device , leveraging the power of the SOME/IP protocol.
Understanding HVAC
HVAC stands for Heating, Ventilation, and Air Conditioning. In the context of automotive engineering, the HVAC system regulates the temperature, humidity, and air quality within the vehicle cabin. It includes components such as heaters, air conditioners, fans, and air filters. Controlling the HVAC system efficiently contributes to passenger comfort and safety during the journey.
Introduction to SOME/IP
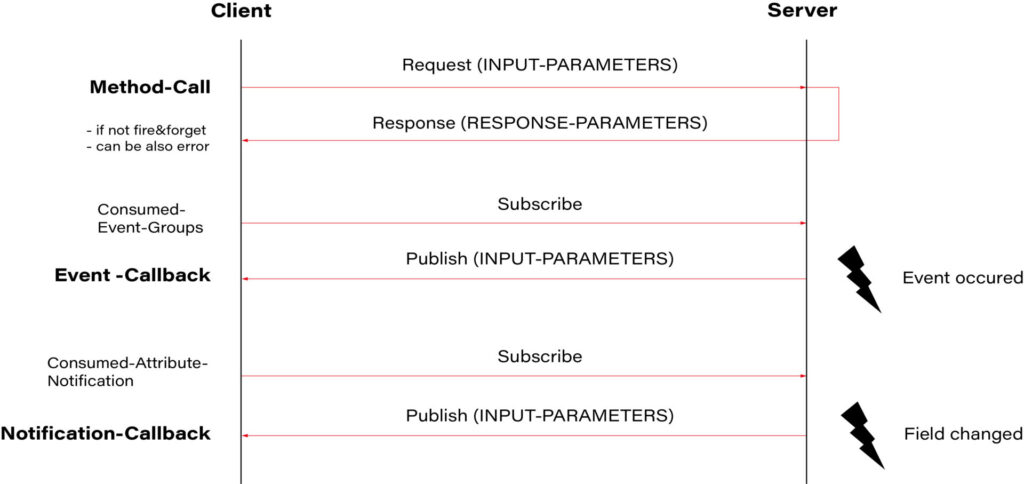
In the SOME/IP paradigm, communication is structured around services, which encapsulate specific functionalities or data exchanges. There are two main roles within the service-oriented model:
Provider: The provider is responsible for offering services to other ECUs within the network. In the automotive context, a provider ECU might control physical actuators, read sensor data, or perform other tasks related to vehicle operation. For example, in our case, the provider would be an application running on a domain controller within the vehicle.
The provider offers services by exposing interfaces that define the methods or data structures available for interaction. These interfaces can include operations to control actuators (e.g., HVAC settings) or methods to read sensor data (e.g., temperature, humidity).
Consumer: The consumer, on the other hand, is an ECU that utilizes services provided by other ECUs within the network. Consumers can subscribe to specific services offered by providers to receive updates or invoke methods as needed. In the automotive context, a consumer might be responsible for interpreting sensor data, sending control commands, or performing other tasks based on received information.
Consumers subscribe to services they are interested in and receive updates whenever there is new data available. They can also invoke methods provided by the service provider to trigger actions or control functionalities. In our scenario, the consumer would be an application running on the Android VHAL (Vehicle Hardware Abstraction Layer), responsible for interacting with the vehicle's network and controlling HVAC settings.
SOME/IP communication flow
The communication flow in SOME/IP follows a publish-subscribe pattern, where providers publish data or services, and consumers subscribe to them to receive updates or invoke methods. This asynchronous communication model allows for efficient and flexible interaction between ECUs within the network.
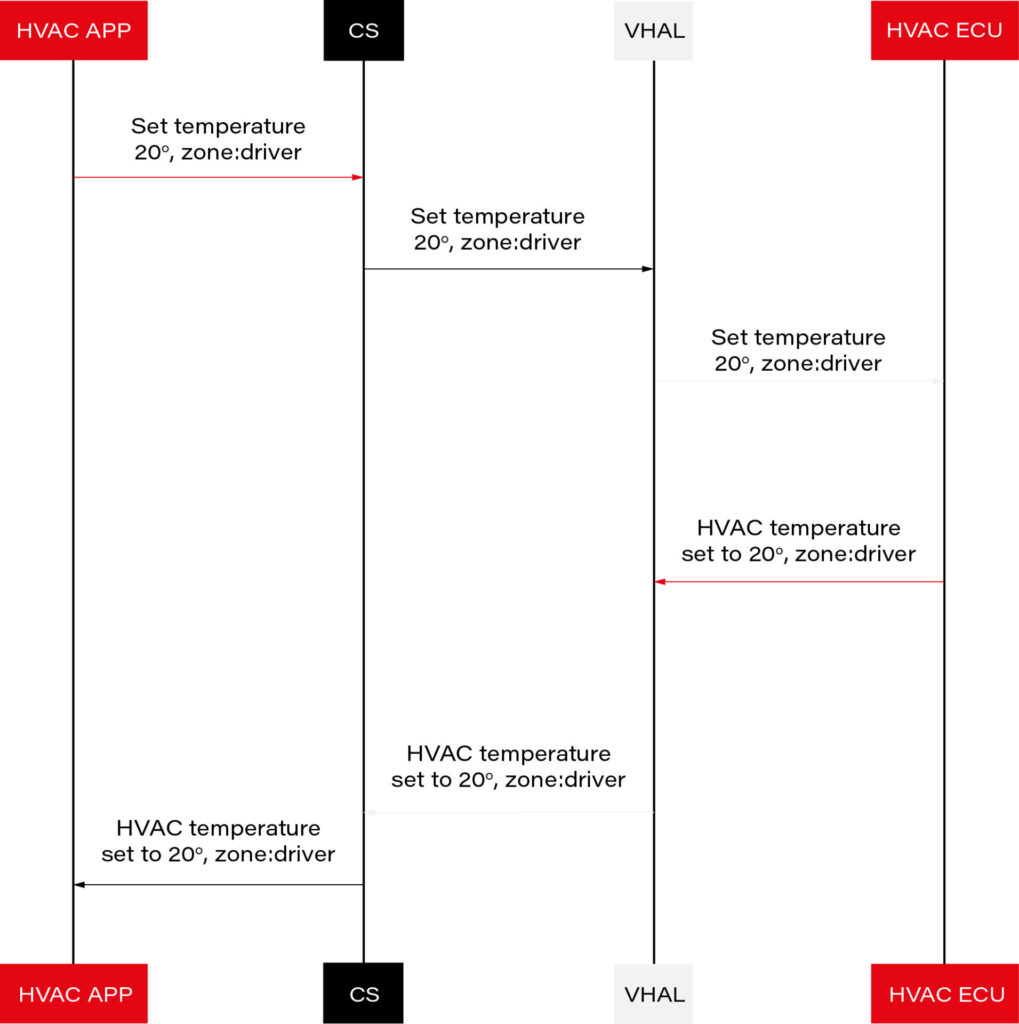
Source: https://github.com/COVESA/vsomeip/wiki/vsomeip-in-10-minutes
In our case, the application running on the domain controller (provider) would publish sensor data such as temperature, humidity, and HVAC status. Subscribed consumers, such as the VHAL application on Android, would receive these updates and could send control commands back to the domain controller to adjust HVAC settings based on user input.
Leveraging VHAL in Android for vehicle networking
To communicate with the vehicle's network, Android provides the Vehicle Hardware Abstraction Layer (VHAL). VHAL acts as a bridge between the Android operating system and the vehicle's onboard systems , enabling seamless integration of Android devices with the car's functionalities. VHAL abstracts the complexities of vehicle networking protocols, allowing developers to focus on implementing features such as HVAC control without worrying about low-level communication details.
Source: https://source.android.com/docs/automotive/vhal/previous/properties
Implementing SOMEIP Consumer in VHAL
To integrate a SOMEIP consumer into VHAL on Android 14, we will use the vsomeip library. Below are the steps required to implement this solution:
Cloning the vsomeip Repository
Go to the main directory of your Android project and create a new directory named external/sdv:
mkdir -p external/sdv
cd external/sdv
git clone https://android.googlesource.com/platform/external/sdv/vsomeip
Implementing SOMEIP Consumer in VHAL
In the hardware/interfaces/automotive/vehicle/2.0/default directory, you can find the VHAL application code. In the VehicleService.cpp file, you will find the default VHAL implementation.
int main(int /* argc */, char* /* argv */ []) {
auto store = std::make_unique<VehiclePropertyStore>();
auto connector = std::make_unique<DefaultVehicleConnector>();
auto hal = std::make_unique<DefaultVehicleHal>(store.get(), connector.get());
auto service = android::sp<VehicleHalManager>::make(hal.get());
connector->setValuePool(hal->getValuePool());
android::hardware::configureRpcThreadpool(4, true /* callerWillJoin */);
ALOGI("Registering as service...");
android::status_t status = service->registerAsService();
if (status != android::OK) {
ALOGE("Unable to register vehicle service (%d)", status);
return 1;
}
ALOGI("Ready");
android::hardware::joinRpcThreadpool();
return 0;
}
The default implementation of VHAL is provided in DefaultVehicleHal which we need to replace in VehicleService.cpp .
From:
auto hal = std::make_unique<DefaultVehicleHal>(store.get(), connector.get());
To:
auto hal = std::make_unique<VendorVehicleHal>(store.get(), connector.get());
For our implementation, we will create a class called VendorVehicleHal and inherit from the DefaultVehicleHal class. We will override the set and get functions.
class VendorVehicleHal : public DefaultVehicleHal {
public:
VendorVehicleHal(VehiclePropertyStore* propStore, VehicleHalClient* client);
VehiclePropValuePtr get(const VehiclePropValue& requestedPropValue,
StatusCode* outStatus) override;
StatusCode set(const VehiclePropValue& propValue) override;
};
The get function is invoked when the Android system requests information from VHAL, and set when it wants to set it. Data is transmitted in a VehiclePropValue object defined in hardware/interfaces/automotive/vehicle/2.0/types.hal.
It contains a variable, prop, which is the identifier of our property. The list of all properties can be found in the types.hal file.
We will filter out only the values of interest and redirect the rest to the default implementation.
StatusCode VendorVehicleHal::set(const VehiclePropValue& propValue) {
ALOGD("VendorVehicleHal::set propId: 0x%x areaID: 0x%x", propValue.prop, propValue.areaId);
switch(propValue.prop)
{
case (int)VehicleProperty::HVAC_FAN_SPEED :
break;
case (int)VehicleProperty::HVAC_FAN_DIRECTION :
break;
case (int)VehicleProperty::HVAC_TEMPERATURE_CURRENT :
break;
case (int)VehicleProperty::HVAC_TEMPERATURE_SET:
break;
case (int)VehicleProperty::HVAC_DEFROSTER :
break;
case (int)VehicleProperty::HVAC_AC_ON :
break;
case (int)VehicleProperty::HVAC_MAX_AC_ON :
break;
case (int)VehicleProperty::HVAC_MAX_DEFROST_ON :
break;
case (int)VehicleProperty::EVS_SERVICE_REQUEST :
break;
case (int)VehicleProperty::HVAC_TEMPERATURE_DISPLAY_UNITS :
break;
}
return DefaultVehicleHal::set(propValue);
}
Now we need to create a SOME/IP service consumer. If you're not familiar with the SOME/IP protocol or the vsomeip library, I recommend reading the guide "vsomeip in 10 minutes" .
It provides a step-by-step description of how to create a provider and consumer for SOME/IP.
In our example, we'll create a class called ZoneHVACService and define SOME/IP service, instance, method, and event IDs:
#define ZONE_HVAC_SERVICE_ID 0x4002
#define ZONE_HVAC_INSTANCE_ID 0x0001
#define ZONE_HVAC_SET_TEMPERATURE_ID 0x1011
#define ZONE_HVAC_SET_FANSPEED_ID 0x1012
#define ZONE_HVAC_SET_AIR_DISTRIBUTION_ID 0x1013
#define ZONE_HVAC_TEMPERATURE_EVENT_ID 0x2011
#define ZONE_HVAC_FANSPEED_EVENT_ID 0x2012
#define ZONE_HVAC_AIR_DISTRIBUTION_EVENT_ID 0x2013
#define ZONE_HVAC_EVENT_GROUP_ID 0x3011
class ZoneHVACService {
public:
ZoneHVACService(bool _use_tcp) :
app_(vsomeip::runtime::get()->create_application(vsomeipAppName)), use_tcp_(
_use_tcp) {
}
bool init() {
if (!app_->init()) {
LOG(ERROR) << "[SOMEIP] " << __func__ << "Couldn't initialize application";
return false;
}
app_->register_state_handler(
std::bind(&ZoneHVACService::on_state, this,
std::placeholders::_1));
app_->register_message_handler(
ZONE_HVAC_SERVICE_ID, ZONE_HVAC_INSTANCE_ID, vsomeip::ANY_METHOD,
std::bind(&ZoneHVACService::on_message, this,
std::placeholders::_1));
app_->register_availability_handler(ZONE_HVAC_SERVICE_ID, ZONE_HVAC_INSTANCE_ID,
std::bind(&ZoneHVACService::on_availability,
this,
std::placeholders::_1, std::placeholders::_2, std::placeholders::_3));
std::set<vsomeip::eventgroup_t> its_groups;
its_groups.insert(ZONE_HVAC_EVENT_GROUP_ID);
app_->request_event(
ZONE_HVAC_SERVICE_ID,
ZONE_HVAC_INSTANCE_ID,
ZONE_HVAC_TEMPERATURE_EVENT_ID,
its_groups,
vsomeip::event_type_e::ET_FIELD);
app_->request_event(
ZONE_HVAC_SERVICE_ID,
ZONE_HVAC_INSTANCE_ID,
ZONE_HVAC_FANSPEED_EVENT_ID,
its_groups,
vsomeip::event_type_e::ET_FIELD);
app_->request_event(
ZONE_HVAC_SERVICE_ID,
ZONE_HVAC_INSTANCE_ID,
ZONE_HVAC_AIR_DISTRIBUTION_EVENT_ID,
its_groups,
vsomeip::event_type_e::ET_FIELD);
app_->subscribe(ZONE_HVAC_SERVICE_ID, ZONE_HVAC_INSTANCE_ID, ZONE_HVAC_EVENT_GROUP_ID);
return true;
}
void send_temp(std::string temp)
{
LOG(INFO) << "[SOMEIP] " << __func__ << " temp: " << temp;
std::shared_ptr< vsomeip::message > request;
request = vsomeip::runtime::get()->create_request();
request->set_service(ZONE_HVAC_SERVICE_ID);
request->set_instance(ZONE_HVAC_INSTANCE_ID);
request->set_method(ZONE_HVAC_SET_TEMPERATURE_ID);
std::shared_ptr< vsomeip::payload > its_payload = vsomeip::runtime::get()->create_payload();
its_payload->set_data((const vsomeip_v3::byte_t *)temp.data(), temp.size());
request->set_payload(its_payload);
app_->send(request);
}
void send_fanspeed(uint8_t speed)
{
LOG(INFO) << "[SOMEIP] " << __func__ << " speed: " << (int)speed;
std::shared_ptr< vsomeip::message > request;
request = vsomeip::runtime::get()->create_request();
request->set_service(ZONE_HVAC_SERVICE_ID);
request->set_instance(ZONE_HVAC_INSTANCE_ID);
request->set_method(ZONE_HVAC_SET_FANSPEED_ID);
std::shared_ptr< vsomeip::payload > its_payload = vsomeip::runtime::get()->create_payload();
its_payload->set_data(&speed, 1U);
request->set_payload(its_payload);
app_->send(request);
}
void start() {
app_->start();
}
void on_state(vsomeip::state_type_e _state) {
if (_state == vsomeip::state_type_e::ST_REGISTERED) {
app_->request_service(ZONE_HVAC_SERVICE_ID, ZONE_HVAC_INSTANCE_ID);
}
}
void on_availability(vsomeip::service_t _service, vsomeip::instance_t _instance, bool _is_available) {
LOG(INFO) << "[SOMEIP] " << __func__ << "Service ["
<< std::setw(4) << std::setfill('0') << std::hex << _service << "." << _instance
<< "] is "
<< (_is_available ? "available." : "NOT available.");
}
void on_temperature_message(const std::shared_ptr<vsomeip::message> & message)
{
auto payload = message->get_payload();
temperature_.resize(payload->get_length());
temperature_.assign((char*)payload->get_data(), payload->get_length());
LOG(INFO) << "[SOMEIP] " << __func__ << " temp: " << temperature_;
if(tempChanged_)
{
tempChanged_(temperature_);
}
}
void on_fanspeed_message(const std::shared_ptr<vsomeip::message> & message)
{
auto payload = message->get_payload();
fan_speed_ = *payload->get_data();
LOG(INFO) << "[SOMEIP] " << __func__ << " speed: " << (int)fan_speed_;
if(fanspeedChanged_)
{
fanspeedChanged_(fan_speed_);
}
}
void on_message(const std::shared_ptr<vsomeip::message> & message) {
if(message->get_method() == ZONE_HVAC_TEMPERATURE_EVENT_ID)
{
LOG(INFO) << "[SOMEIP] " << __func__ << "TEMPERATURE_EVENT_ID received";
on_temperature_message(message);
}
else if(message->get_method() == ZONE_HVAC_FANSPEED_EVENT_ID)
{
LOG(INFO) << "[SOMEIP] " << __func__ << "ZONE_HVAC_FANSPEED_EVENT_ID received";
on_fanspeed_message(message);
}
}
std::function<void(std::string temp)> tempChanged_;
std::function<void(uint8_t)> fanspeedChanged_;
private:
std::shared_ptr< vsomeip::application > app_;
bool use_tcp_;
std::string temperature_;
uint8_t fan_speed_;
uint8_t air_distribution_t;
};
In our example, we will connect ZoneHVACService and VendorVehicleHal using callbacks.
hal->fandirectionChanged_ = [&](uint8_t direction) {
ALOGI("HAL fandirectionChanged_ callback direction: %u", direction);
hvacService->send_fandirection(direction);
};hal->fanspeedChanged_ = [&](uint8_t speed) {
ALOGI("HAL fanspeedChanged_ callback speed: %u", speed);
hvacService->send_fanspeed(speed);
};
The last thing left for us to do is to create a configuration for the vsomeip library. It's best to utilize a sample file from the library: https://github.com/COVESA/vsomeip/blob/master/config/vsomeip-local.json
In this file, you'll need to change the address:
"unicast" : "10.0.2.15",
to the address of our Android device.
Additionally, you need to set:
"routing" : "service-sample",
to the name of our application.
The vsomeip stack reads the application address and the path to the configuration file from environment variables. The easiest way to do this in Android is to set it up before creating the ZoneHVACService object.
setenv("VSOMEIP_CONFIGURATION","/vendor/etc/vsomeip-local-hvac.json",1);
setenv("VSOMEIP_APPLICATION_NAME," "hvac-service",1);
That’s it. Now, we shoudl replace vendor/bin/hw/android.hardware.automotive.vehicle@2.0-default-service with our new build and reboot Android.
If everything was configured correctly, we should see such logs, and the provider should get our requests.
04-25 06:52:12.989 3981 3981 I automotive.vehicle@2.0-default-service: Starting automotive.vehicle@2.0-default-service ...
04-25 06:52:13.005 3981 3981 I automotive.vehicle@2.0-default-service: Registering as service...
04-25 06:52:13.077 3981 3981 I automotive.vehicle@2.0-default-service: Ready
04-25 06:52:13.081 3981 4011 I automotive.vehicle@2.0-default-service: Starting UDP receiver
04-25 06:52:13.081 3981 4011 I automotive.vehicle@2.0-default-service: Socket created
04-25 06:52:13.082 3981 4010 I automotive.vehicle@2.0-default-service: HTTPServer starting
04-25 06:52:13.082 3981 4010 I automotive.vehicle@2.0-default-service: HTTPServer listen
04-25 06:52:13.091 3981 4012 I automotive.vehicle@2.0-default-service: Initializing SomeIP service ...
04-25 06:52:13.091 3981 4012 I automotive.vehicle@2.0-default-service: [SOMEIP] initInitialize app
04-25 06:52:13.209 3981 4012 I automotive.vehicle@2.0-default-service: [SOMEIP] initApp initialized
04-25 06:52:13.209 3981 4012 I automotive.vehicle@2.0-default-service: [SOMEIP] initClient settings [protocol=UDP]
04-25 06:52:13.210 3981 4012 I automotive.vehicle@2.0-default-service: [SOMEIP] Initialized SomeIP service result:1
04-25 06:52:13.214 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_availabilityService [4002.1] is NOT available.
04-25 06:54:35.654 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_availabilityService [4002.1] is available.
04-25 06:54:35.774 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_message Message received: [4002.0001.2012] to Client/Session [0000/0002]
04-25 06:54:35.774 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_messageZONE_HVAC_FANSPEED_EVENT_ID received
04-25 06:54:35.774 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_fanspeed_message speed: 1
04-25 06:54:35.775 3981 4028 I automotive.vehicle@2.0-default-service: SOMEIP fanspeedChanged_ speed: 1
04-25 06:54:36.602 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_message Message received: [4002.0001.2012] to Client/Session [0000/0003]
04-25 06:54:36.602 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_messageZONE_HVAC_FANSPEED_EVENT_ID received
04-25 06:54:36.603 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_fanspeed_message speed: 2
04-25 06:54:36.603 3981 4028 I automotive.vehicle@2.0-default-service: SOMEIP fanspeedChanged_ speed: 2
04-25 06:54:37.605 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_message Message received: [4002.0001.2012] to Client/Session [0000/0004]
04-25 06:54:37.606 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_messageZONE_HVAC_FANSPEED_EVENT_ID received
04-25 06:54:37.606 3981 4028 I automotive.vehicle@2.0-default-service: [SOMEIP] on_fanspeed_message speed: 3
04-25 06:54:37.606 3981 4028 I automotive.vehicle@2.0-default-service: SOMEIP fanspeedChanged_ speed: 3
Summary
In conclusion, the integration of Android devices with Vehicle Hardware Abstraction Layer (VHAL) for controlling HVAC systems opens up a new realm of possibilities for automotive technology. By leveraging the power of SOME/IP communication protocol and the vsomeip library, developers can create robust solutions for managing vehicle HVAC functionalities.
By following the steps outlined in this article, developers can create custom VHAL implementations tailored to their specific needs. From defining service interfaces to handling communication callbacks, every aspect of the integration process has been carefully explained to facilitate smooth development.
As automotive technology continues to evolve, the convergence of Android devices and vehicle systems represents a significant milestone in the journey towards smarter, more connected vehicles. The integration of HVAC control functionalities through VHAL and SOME/IP not only demonstrates the potential of modern automotive technology but also paves the way for future innovations in the field.

Integrating generative AI with knowledge graphs for enhanced data analytics
The integration of generative AI into data analytics is transforming business data management and interpretation, opening vast possibilities across industries.
Recent statistics from a Gartner survey indicate significant strides in the adoption of generative AI: 45% of organizations are now piloting generative AI projects, with 10% having fully integrated these systems into their operations. This marks a considerable increase from earlier figures, demonstrating a rapid adoption curve. Additionally, by 2026, it's predicted that more than 80% of organizations will use generative AI applications, up from less than 5% just three years prior.
Combining generative AI and knowledge graphs for data analytics
The potential impact of combining generative AI with knowledge graphs is particularly promising. This synergy enhances data analytics by improving accuracy, speeding up data processing, and enabling deeper insights into complex datasets. As adoption continues to expand, the mentioned technologies will transform how organizations leverage data for strategic advantage.
This article details the specific benefits of generative AI and knowledge graphs and how their integration can boost data-based decision-making processes.
Maximizing generative AI potential in data analytics
Generative AI has revolutionized data analytics by automating tasks that traditionally required significant human effort and by providing new methods to manage and interpret large datasets. Here is a more detailed explanation of how GenAI operates in various aspects of data analytics.
Rapid Summarization of Information
GenAI's ability to swiftly process and summarize large volumes of data is a boon in situations that demand quick insights from extensive datasets. This is especially critical in areas like financial analysis or market trend monitoring, where rapid information condensation can significantly expedite decision-making processes.
Enhanced Data Enrichment
In the initial stages of data analytics , raw data is often unstructured and may contain errors or gaps. GenAI plays a crucial role in enriching this raw data before it can be effectively visualized or analyzed. This includes cleaning the data, filling in missing values, generating new features, and integrating external data sources to add depth and context. Such capabilities are particularly beneficial in scenarios like predictive modeling for customer behavior, where historical data may not fully capture current trends.
Automation of Repetitive Data Preparation Tasks
Data preparation is often the most time-consuming part of data analytics. GenAI helps automate these processes with unmatched precision and speed. This not only enhances the efficiency and accuracy of data preparation but also improves data quality by quickly identifying and correcting inconsistencies.
Complex Data Simplification
GenAI expertly simplifies complex data patterns, making them easy to understand and accessible. This allows users with varying levels of expertise to derive actionable insights and make informed decisions effortlessly.
Interactive Data Exploration via Conversational Interfaces
GenAI uses Natural Language Processing (NLP) to facilitate interactions, allowing users to query data in everyday language. This significantly lowers the barrier to data exploration, making analytics tools more user-friendly and extending their use across different organizational departments.
The use of knowledge graphs in data analytics
Knowledge graphs prove increasingly useful in data analytics, providing a solid framework to improve decision-making in various industries. These graphs represent data as interconnected networks of entities linked by relationships, enabling intuitive and sophisticated analysis of complex datasets.
What are associative knowledge graphs?
Associative knowledge graphs are a specialized subset of knowledge graphs that excel in identifying and leveraging intricate and often subtle associations among data elements. These associations include not only direct links but also indirect and inferred relationships that are crucial for deep data analysis, AI modeling, and complex decision-making processes where understanding subtle connections can be crucial.
Associative knowledge graphs functionalities
Associative knowledge graphs are useful in dynamic environments where data constantly evolves. They can incorporate incremental updates without major structural changes , allowing them to quickly adapt and maintain accuracy without extensive modifications. This is particularly beneficial in scenarios where knowledge graphs need to be updated frequently with new information without retraining or restructuring the entire graph.
Designed to handle complex queries involving multiple entities and relationships, these graphs offer advanced capabilities beyond traditional relational databases. This is due to their ability to represent data in a graph structure that reflects the real-world interconnections between different pieces of information. Whether the data comes from structured databases, semi-structured documents, or unstructured sources like texts and multimedia, associative knowledge graphs can amalgamate these different data types into a unified model.
Additionally, associative knowledge graphs generate deeper insights in data analytics through cognitive and associative linking . They connect disparate data points by mimicking human cognitive processes, revealing patterns important for strategic decision-making.

Generative AI and associative knowledge graphs: Synergy for analytics
The integration of Generative AI with associative knowledge graphs enhances data processing and analysis in three key ways: speed, quality of insights, and deeper understanding of complex relationships.
Speed: GenAI automates conventional data management tasks , significantly reducing the time required for data cleansing, validation, and enrichment. This helps decrease manual efforts and speed up data handling. Combining it with associative knowledge graphs simplifies data integration and enables faster querying and manipulation of complex datasets, enhancing operational efficiency.
Quality of Insights: GenAI and associative knowledge graphs work together to generate high-quality insights. GenAI quickly processes large datasets to deliver timely and relevant information. Knowledge graphs enhance these outputs by providing semantic and contextual depth, where precise insights are vital.
Deeper Understanding of Complex Relationships: By illustrating intricate data relationships, knowledge graphs reveal hidden patterns and correlations which leads to more comprehensive and actionable insights that can improve data utilization in complex scenarios.
Example applications
Healthcare:
- Patient Risk Prediction : GenAI and associative knowledge graphs can be used to predict patient risks and health outcomes by analyzing and interpreting comprehensive data, including historical records, real-time health monitoring from IoT devices, and social determinants of health. This integration enables creation of personalized treatment plans and preventive care strategies.
- Operational Efficiency Optimization : These technologies optimize resource allocation, staff scheduling, and patient flow by integrating data from various hospital systems (electronic health records, staffing schedules, patient admissions). This results in more efficient resource utilization, reduced waiting times and improved overall care delivery.
Insurance, Banking & Finance:
- Risk Assessment / Credit Scoring : Using a broad array of data points such as historical financial data, social media activity, and IoT device data, GenAI and knowledge graphs can help generate accurate risk assessments and credit scores. This comprehensive analysis uncovers complex relationships and patterns, enhancing the understanding of risk profiles.
- Customer Lifetime Value Prediction : These technologies are utilized to analyze transaction and interaction data to predict future banking behaviors and assess customer profitability. By tracking customer behaviors, preferences, and historical interactions, they allow for the development of personalized marketing campaigns and loyalty programs, boosting customer retention and profitability.
Retail:
- Inventory Management : Customers can also use GenAI and associative knowledge graphs to optimize inventory management and prevent overstock and stockouts. Integrating supply chain data, sales trends, and consumer demand signals ensures balanced inventory aligned with market needs, improving operational efficiency and customer satisfaction.
- Sales & Price Forecasting : Otherwise, you can forecast future sales and price trends by analyzing historical sales data, economic indicators, and consumer behavior patterns. By combining various data sources, you get a comprehensive understanding of sales dynamics and price fluctuations, aiding in strategic planning and decision-making.
gIQ – data analytics platform powered by generative AI and associative knowledge graphs
The gIQ data analytics platform demonstrates one example of integrating generative AI with knowledge graphs. Developed by Grape Up founders, this solution represents a cutting-edge approach, allowing for transformation of raw data into applicable knowledge. This integration allows gIQ to swiftly detect patterns and establish connections, delivering critical insights while bypassing the intensive computational requirements of conventional machine learning techniques. Consequently, users can navigate complex data environments easily, paving the way for informed decision-making and strategic planning.
Conclusion
The combination of generative AI and knowledge graphs is transforming data analytics by allowing organizations to analyze data more quickly, accurately, and insightfully. The increasing use of these technologies indicates that they are widely recognized for their ability to improve decision-making and operational efficiency in a variety of industries.
Looking forward, it's highly likely that the ongoing development and improvement of these technologies will unlock more advanced and sophisticated applications. This will drive innovation and give organizations a strategic advantage. Embracing these advancements isn't just beneficial, it's essential for companies that want to remain competitive in an increasingly data-driven world.

From silos to synergy: How LLM Hubs facilitate chatbot integration
In today's tech-driven business environment, large language models (LLM)-powered chatbots are revolutionizing operations across a myriad of sectors, including recruitment, procurement, and marketing. In fact, the Generative AI market can gain $1.3 trillion worth by 2032. As companies continue to recognize the value of these AI-driven tools, investment in customized AI solutions is burgeoning. However, the growth of Generative AI within organizations brings to the fore a significant challenge: ensuring LLM interoperability and effective communication among the numerous department-specific GenAI chatbots.
The challenge of siloed chatbots
In many organizations, the deployment of GenAI chatbots in various departments has led to a fragmented landscape of AI-powered assistants. Each chatbot, while effective within its domain, operates in isolation, which can result in operational inefficiencies and missed opportunities for cross-departmental AI use.
Many organizations face the challenge of having multiple GenAI chatbots across different departments without a centralized entry point for user queries. This can cause complications when customers have requests, especially if they span the knowledge bases of multiple chatbots.
Let’s imagine an enterprise, which we’ll call Company X, which uses separate chatbots in human resources, payroll, and employee benefits. While each chatbot is designed to provide specialized support within its domain, employees often have questions that intersect these areas. Without a system to integrate these chatbots, an employee seeking information about maternity leave policies, for example, might have to interact with multiple unconnected chatbots to understand how their leave would affect their benefits and salary.
This fragmented experience can lead to confusion and inefficiencies, as the chatbots cannot provide a cohesive and comprehensive response.
Ensuring LLM interoperability
To address such issues, an LLM hub must be created and implemented. The solution lies in providing a single user interface that serves as the one point of entry for all queries, ensuring LLM interoperability. This UI should enable seamless conversations with the enterprise's LLM assistants, where, depending on the specific question, the answer is sourced from the chatbot with the necessary data.
This setup ensures that even if separate teams are working on different chatbots, these are accessible to the same audience without users having to interact with each chatbot individually. It simplifies the user's experience, even as they make complex requests that may target multiple assistants. The key is efficient data retrieval and response generation, with the system smartly identifying and pulling from the relevant assistant as needed.
In practice at Company X, the user interacts with a single interface to ask questions. The LLM hub then dynamically determines which specific chatbot – whether from human resources, payroll, or employee benefits (or all of them) – has the requisite information and tuning to deliver the correct response. Rather than the user navigating through different systems, the hub brings the right system to the user.
This centralized approach not only streamlines the user experience but also enhances the accuracy and relevance of the information provided. The chatbots, each with its own specialized scope and data, remain interconnected through the hub via APIs. This allows for LLM interoperability and a seamless exchange of information, ensuring that the user's query is addressed by the most informed and appropriate AI assistant available.
Advantages of LLM Hubs
- LLM hubs provide a unified user interface from which all enterprise assistants can be accessed seamlessly. As users pose questions, the hub evaluates which chatbot has the necessary data and specific tuning to address the query and routes the conversation to that agent, ensuring a smooth interaction with the most knowledgeable source.
- The hub's core functionality includes the intelligent allocation of queries . It does not indiscriminately exchange data between services but selectively directs questions to the chatbot best equipped with the required data and configuration to respond, thus maintaining operational effectiveness and data security.
- The service catalog remains a vital component of the LLM hub, providing a centralized directory of all chatbots and their capabilities within the organization. This aids users in discovering available AI services and enables the hub to allocate queries more efficiently, preventing redundant development of AI solutions.
- The LLM hub respects the specialized knowledge and unique configurations of each departmental chatbot. It ensures that each chatbot applies its finely-tuned expertise to deliver accurate and contextually relevant responses, enhancing the overall quality of user interaction.
- The unified interface offered by LLM hubs guarantees a consistent user experience. Users engage in conversations with multiple AI services through a single touchpoint, which maintains the distinct capabilities of each chatbot and supports a smooth, integrated conversation flow.
- LLM hubs facilitate the easy management and evolution of AI services within an organization. They enable the integration of new chatbots and updates, providing a flexible and scalable infrastructure that adapts to the business's growing needs.
At Company X, the introduction of the LLM hub transformed the user experience by providing a single user interface for interacting with various chatbots.
The IT department's management of chatbots became more streamlined. Whenever updates or new configurations were made to the LLM hub, they were effectively distributed to all integrated chatbots without the need for individual adjustments.
The scalable nature of the hub also facilitated the swift deployment of new chatbots, enabling Company X to rapidly adapt to emerging needs without the complexities of setting up additional, separate systems. Each new chatbot connects to the hub, accessing and contributing to the collective knowledge network established within the company.
Things to consider when implementing the LLM Hub solution
1. Integration with Legacy Systems : Enterprises with established legacy systems must devise strategies for integrating with LLM hubs. This ensures that these systems can engage with AI-driven technologies without disrupting existing workflows.
2. Data Privacy and Security: Given that chatbots handle sensitive data, it is crucial to maintain data privacy and security during interactions and within the hub. Implementing strong encryption and secure transfer protocols, along with adherence to regulations such as GDPR, is necessary to protect data integrity.
3. Adaptive Learning and Feedback Loops: Embedding adaptive learning within LLM hubs is key to the progressive enhancement of chatbot interactions. Feedback loops allow for continual learning and improvement of provided responses based on user interactions.
4. Multilingual Support: Ideally, LLM hubs should accommodate multilingual capabilities to support global operations. This enables chatbots to interact with a diverse user base in their preferred languages, broadening the service's reach and inclusivity.
5. Analytics and Reporting: The inclusion of advanced analytics and reporting within the LLM hub offers valuable insights into chatbot interactions. Tracking metrics like response accuracy and user engagement helps fine-tune AI services for better performance.
6. Scalability and Flexibility: An LLM hub should be designed to handle scaling in response to the growing number of interactions and the expanding variety of tasks required by the business, ensuring the system remains robust and adaptable over time.
Conclusion
LLM hubs represent a proactive approach to overcoming the challenges posed by isolated chatbot s within organizations. By ensuring LLM interoperability and fostering seamless communication between different AI services, these hubs enable companies to fully leverage their AI assets.
This not only promotes a more integrated and efficient operational structure but also sets the stage for innovation and reduced complexity in the AI landscape. As GenAI adoption continues to expand, developing interoperability solutions like the LLM hub will be crucial for businesses aiming to optimize their AI investments and achieve a cohesive and effective chatbot ecosystem.


Exploring the architecture of automotive electronics: Domain vs. zone
The automotive industry is undergoing a transformative shift towards electrification and automation, with vehicles becoming increasingly reliant on sophisticated electrical and electronic systems. At the heart of this evolution lies the architecture that governs how these systems are organized and integrated within the vehicle. Two prominent paradigms have emerged in this domain: domain architecture and zone architecture.
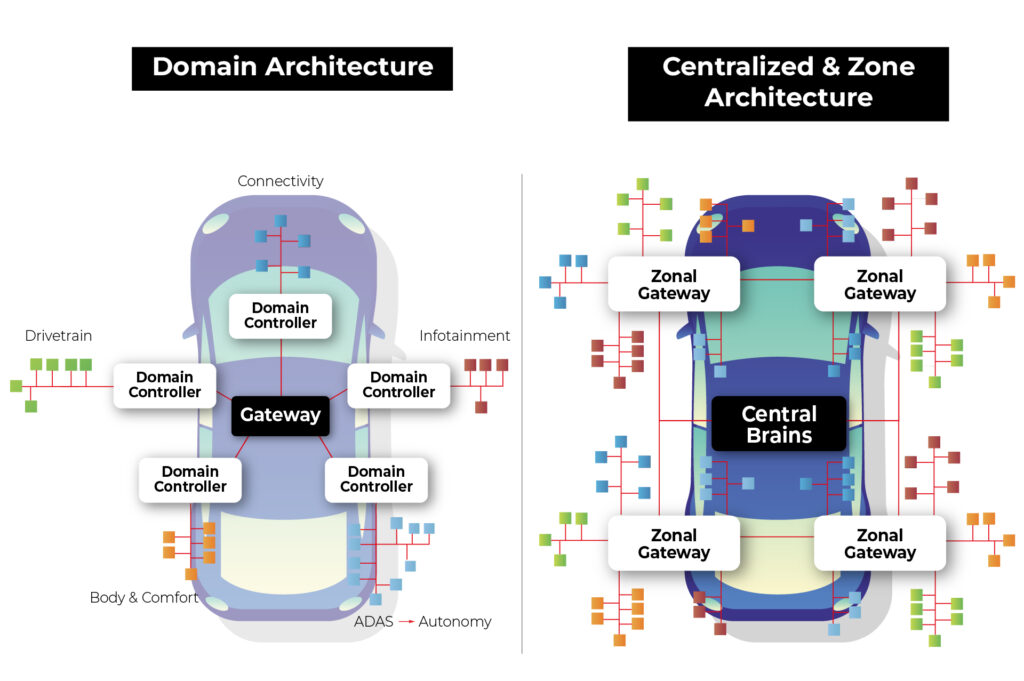
Source: https://www.eetasia.com/the-role-of-centralized-storage-in-the-emerging-zonal-automotive-architecture/
Domain Architecture : In this approach, various electrical and electronic functions are organized around "domains" or functional modules. Each domain is responsible for a specific functional area of the vehicle, such as the engine, braking system, steering system, etc. Each domain may have its independent controllers and communication networks.
Example : In a domain architecture setup, the engine domain would handle all functions related to the vehicle's engine, including ignition, fuel injection, and emissions control. This domain would have its dedicated controller managing these operations.
Zone Architecture : In this approach, the electrical and electronic systems are organized around different "zones" within the vehicle. Zones typically correspond to specific physical areas of the vehicle, such as the front dashboard, passenger cabin, front-end, rear-end, etc. Each zone may have independent electrical and electronic systems tailored to specific needs and functions.
Example : In a zone architecture setup, the front-end zone might encompass functions like lighting, HVAC (Heating, Ventilation, and Air Conditioning), and front-facing sensors for driver assistance systems. These functions would be integrated into a system optimized for the front-end zone's requirements.
Advantages of zonal architecture over domain architecture
In the realm of automotive electronics, zone architecture offers several advantages over domain architecture, revolutionizing the way vehicles are designed, built, and operated. Let's explore these advantages in detail:
1. Software defined vehicle (SDV)
The concept of a Software Defined Vehicle (SDV) represents a paradigm shift in automotive engineering, transforming vehicles into dynamic platforms driven by software innovation. SDV involves decoupling the application layer from the hardware layer, creating a modular and flexible system that offers several significant advantages:
Abstraction of Application from Hardware : In an SDV architecture, applications are abstracted from the underlying hardware, creating a layer of abstraction that simplifies development and testing processes. This separation allows developers to focus on building software functionalities without being constrained by hardware dependencies.
Sensor Agnosticism : One of the key benefits of SDV is the ability to utilize sensors across multiple applications without being tied to specific domains. In traditional domain architectures, sensors are often dedicated to specific functions, limiting their flexibility and efficiency. In an SDV setup, sensors are treated as shared resources that can be accessed and utilized by various applications independently. This sensor agnosticism enhances resource utilization and reduces redundancy, leading to optimized system performance and cost-effectiveness.
Independent Software Updates : SDV enables independent software updates for different vehicle functions and applications. Instead of relying on centralized control units or domain-specific controllers, software functionalities can be updated and upgraded autonomously, enhancing the agility and adaptability of the vehicle.
The OTA system in zonal architecture is also simpler in general as the whole idea is based on abstracting software from hardware, and less tightly coupled software is way easier to update remotely.
With independent software updates, manufacturers can address software bugs, introduce new features and deploy security patches more efficiently. This capability ensures that vehicles remain up-to-date with the latest advancements and safety standards, enhancing user satisfaction and brand reputation.
2. Security
Zone architecture in automotive electronics offers concrete advantages over domain architecture. Let's examine how zone architecture addresses security concerns more effectively compared to domain architecture:
Network Access Vulnerabilities in Domain Architecture:
In domain architecture, connecting to the vehicle network grants access to the entire communication ecosystem, including sensors, actuators, and the central computer.
Particularly concerning is the Controller Area Network (CAN), a widely used protocol lacking built-in authentication and authorization mechanisms. Once connected to a CAN network, an attacker can send arbitrary messages as if originating from legitimate devices.
Granular Access Control in Zone Architecture:
Zone architecture introduces granular access control mechanisms, starting at the nearest gateway to the zone. Each message passing through the gateway is scrutinized, allowing only authorized communications to proceed while rejecting unauthorized ones.
By implementing granular access control, attackers accessing the network gain access only to communication between sensors and the gateway. Moreover, the architecture enables the segregation of end networks based on threat levels.
Network Segmentation for Enhanced Security:
In a zone architecture setup, it's feasible to segment networks based on the criticality of components and potential exposure to threats.
Less critical sensors and actuators can be grouped together on a single CAN network. Conversely, critical sensors vulnerable to external access can be connected via encrypted Ethernet connections, offering an additional layer of security.
In summary, zone architecture provides a reliable solution to security vulnerabilities inherent in domain architecture. By implementing granular access control and network segmentation, zone architecture significantly reduces the attack surface and enhances the overall security posture of automotive systems. This approach ensures that critical vehicle functions remain protected against unauthorized access and manipulation, safeguarding both the vehicle and its occupants from potential cyber threats.
3. Simplified and lightweight wiring
Wiring in automotive electronics plays a critical role in connecting various components and systems within the vehicle. However, it also poses challenges, particularly in terms of weight and complexity. This section, explores how zone architecture addresses these challenges, leading to simplified and lightweight wiring solutions.
The Weight of Wiring: It's important to recognize that wiring is one of the heaviest components in a vehicle, trailing only behind the chassis and engine. In fact, the total weight of wiring harnesses in a vehicle can reach up to 70 kilograms. This significant weight contributes to the overall mass of the vehicle, affecting fuel efficiency, handling, and performance.
Challenges with Traditional Wiring: Traditional wiring systems, especially in domain architecture, often involve long and complex wiring harnesses that span the entire vehicle. This extensive wiring adds to the overall weight and complexity of the vehicle, making assembly and maintenance more challenging.
The Promise of Zone Architecture: Zonal architecture offers a promising alternative by organizing vehicle components into functional zones. This approach allows for more localized placement of sensors, actuators, and control units within each zone, minimizing the distance between components and reducing the need for lengthy wiring harnesses.
Reduced Cable Length: By grouping components together within each zone, zone architecture significantly reduces the overall cable length required to connect these components. Shorter cable runs translate to lower electrical resistance, reduced signal attenuation, and improved signal integrity, resulting in more reliable and responsive vehicle systems.
Optimized Routing and Routing Flexibility: Zone architecture allows for optimized routing of wiring harnesses, minimizing interference and congestion between different systems and components. Moreover, the flexibility inherent in zone architecture enables easier adaptation to different vehicle configurations and customer preferences without the constraints imposed by rigid wiring layouts.
4. Easier and cheaper production
Zonal architecture not only enhances the functionality and efficiency of automotive electronics but also streamlines the production process, making it easier and more cost-effective. Let's explore how zone architecture achieves this:
Modular Assembly : One of the key advantages of zone architecture is its modular nature, which allows for the assembly of individual zones separately before integrating them into the complete vehicle. This modular approach simplifies the assembly process, as each zone can be constructed and tested independently, reducing the complexity of assembly lines and minimizing the risk of errors during assembly.
Reduced Wiring Complexity : The reduction in wiring complexity achieved through zone architecture has a significant impact on production costs. Wiring harnesses are one of the most expensive components in a vehicle, primarily due to the labor-intensive nature of their installation. Each wire must be routed and connected individually, and since each domain typically has its own wiring harness, the process becomes even more laborious.
Automation Challenges with Wiring : Furthermore, automating the wiring process is inherently challenging due to the intricate nature of routing wires and connecting them to various components. While automation has been successfully implemented in many aspects of automotive production, wiring assembly remains largely manual, requiring a significant workforce to complete the task efficiently.
Batch Production of Zones : With zone architecture, the assembly of individual zones can be batch-produced, allowing for standardized processes and economies of scale. This approach enables manufacturers to optimize production lines for specific tasks, reduce setup times between production runs, and achieve greater consistency and quality control.
Integration of Wiring Harnesses : Another advantage of zone architecture is the integration of wiring harnesses into larger assemblies, such as the entire zone. By combining wiring harnesses and assembly for an entire zone into a single process, manufacturers can significantly accelerate production and reduce costs associated with wiring installation and integration.
In summary, zone architecture simplifies and streamlines the production process of vehicles by allowing for modular assembly, reducing wiring complexity, addressing automation challenges, and facilitating batch production of zones. By integrating wiring harnesses into larger assemblies and optimizing production lines, manufacturers can achieve cost savings, improve efficiency, and enhance overall quality in automotive production.
Introduction to zone architecture demonstration
In our Research and Development (R&D) department, we're thrilled to present a demonstration showcasing the power and versatility of zone architecture in automotive electronics. Let's take a closer look at the key components of our setup:
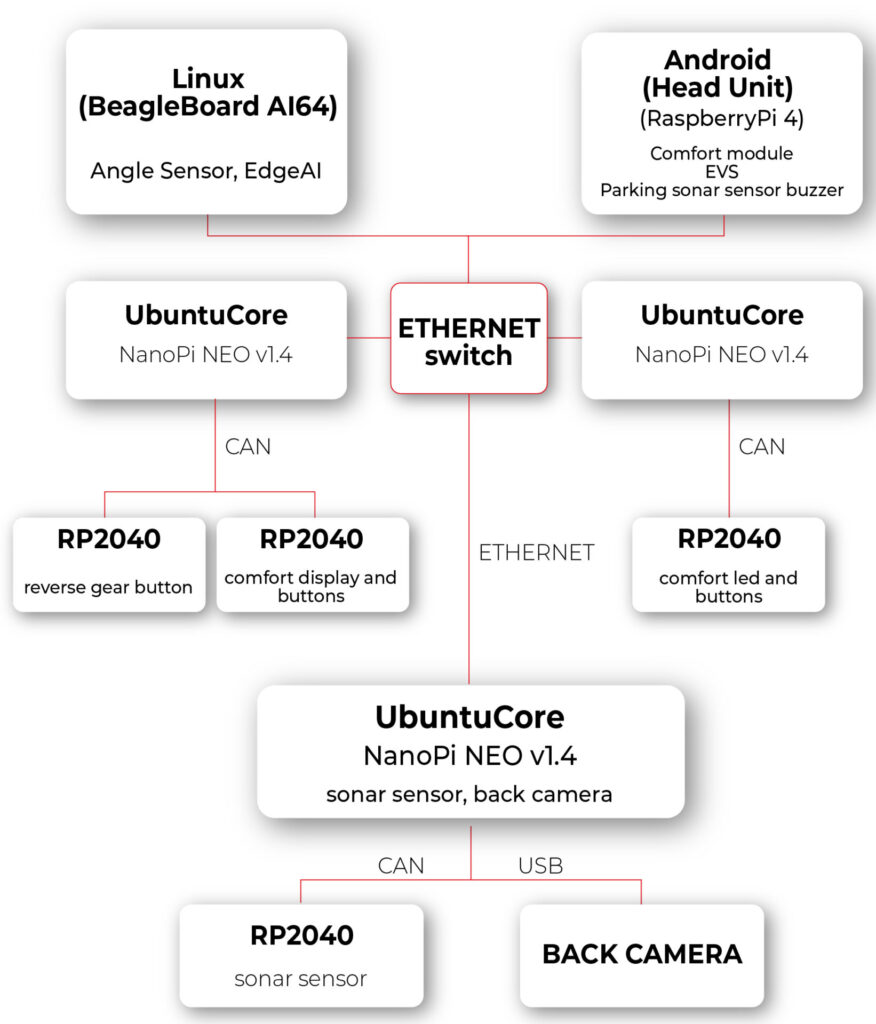
1. Android Computer with Modified VHAL for HVAC:
- Our central computing platform is an Android 14 device running Android Automotive OS (AAOS). This device serves as the hub for system control and communication.
- The modified Vehicle Hardware Abstraction Layer (VHAL) is a pivotal component of our setup. This software layer enables seamless interaction with the vehicle's HVAC module.
- The modified VHAL establishes a connection with the HVAC module through Ethernet and REST API communication protocols, facilitating real-time control and monitoring of HVAC functions.
2. Zone Computer with Ubuntu Core and HVAC Controller Application:
- Each zone in our architecture is equipped with a dedicated computer running Ubuntu Core.
- These zone computers act as the brains of their respective zones, hosting our custom HVAC controller application.
- The HVAC controller application, developed in-house, is responsible for interpreting commands received from the central Android computer and orchestrating HVAC operations within the zone.
- By leveraging Ethernet and REST API communication, as well as the Controller Area Network (CAN) network, the HVAC controller application ensures seamless integration and coordination of HVAC functions.
3. Microcontroller for Physical Interface:
- To provide users with intuitive control over HVAC settings, we've integrated a microcontroller into our setup.
- The microcontroller serves as an interface between the physical controls (buttons and display) and the zone computer.
- Using the CAN interface, the microcontroller relays user inputs to the zone computer, enabling responsive and interactive control of HVAC parameters.
- By bridging the gap between the digital and physical domains, the microcontroller enhances user experience and usability, making HVAC control intuitive and accessible.
The experiment with zone architecture in automotive electronics has proven the effectiveness of our setup. In our solution, pressing a button triggers the transmission of information to the zone computer, where the temperature is adjusted and broadcasted to the respective temperature displays in the zone and to the main Android Automotive OS (head unit IVI). Additionally, changing the temperature via the interface on Android results in sending information to the appropriate zone, thereby adjusting the temperature in that zone.
During the hardware layer testing, we utilized the REST API protocol to expedite implementation. However, we observed certain limitations of this solution. Specifically, we anticipated from the outset that the REST API protocol would not suffice for our needs. The VHAL in the Android system needs to know the HTTP addresses of individual zones and specify to which zone the temperature change should be sent. This approach is not very flexible and may introduce delays associated with each connection to the HTTP server.
In the next article, we plan to review available communication protocols and methods of message description in such a network. Our goal will be to find protocols that excel in terms of speed, flexibility of application, and security. By doing so, we aim to further refine our solution and maximize its effectiveness in the context of zone architecture in automotive electronics.
Addressing data governance challenges in enterprises through the use of LLM Hubs
In an era where more than 80% of enterprises are expected to use Generative AI by 2026, up from less than 5% in 2023, the integration of AI chatbots is becoming increasingly common. This adoption is driven by the significant efficiency boosts these technologies offer, with over half of businesses now deploying conversational AI for customer interactions.
In fact, 92% of Fortune 500 companies are using OpenAI’s technology, with 94% of business executives believing that AI is a key to success in the future.
Challenges to GenAI implementation
The implementation of large language models (LLMs) and AI-driven chatbots is a challenging task in the current enterprise technology scene. Apart from the complexity of integrating these technologies, there is a crucial need to manage the vast amount of data they process securely and ethically. This emphasizes the importance of having robust data governance practices in place.
Organizations deploying generative AI chatbots may face security risks associated with both external breaches and internal data access. Since these chatbots are designed to streamline operations, they require access to sensitive information . Without proper control measures in place, there is a high possibility that confidential information may be inadvertently accessed by unauthorized personnel.
For example, chatbots or AI tools are used to automate financial processes or provide financial insights. Failures in secure data management in this context may lead to malicious breaches.
Similarly, a customer service bot may expose confidential customer data to departments that do not have a legitimate need for it. This highlights the need for strict access controls and proper data handling protocols to ensure the security of sensitive information.
Dealing with complexities of data governance and LLMs
To integrate LLMs into current data governance frameworks, organizations need to adjust their strategy. This lets them use LLMs effectively while still following important standards like data quality, security, and compliance.
- It is crucial to adhere to ethical and regulatory standards when using data within LLMs. Establish clear guidelines for data handling and privacy.
- Devise strategies for the effective management and anonymization of the vast data volumes required by LLMs.
- Regular updates to governance policies are necessary to keep pace with technological advancements, ensuring ongoing relevance and effectiveness.
- Implement strict oversight and access controls to prevent unauthorized exposure of sensitive information through, for example, chatbots.
Introducing the LLM hub: centralizing data governance
An LLM hub empowers companies to manage data governance effectively by centralizing control over how data is accessed, processed, and used by LLMs within the enterprise. Instead of implementing fragmented solutions, this hub serves as a unified platform for overseeing and integrating AI processes.
By directing all LLM interactions through this centralized platform, businesses can monitor how sensitive data is being handled. This guarantees that confidential information is only processed when required and in full compliance with privacy regulations.
Role-Based Access Control in the LLM hub
A key feature of the LLM Hub is its implementation of Role-Based Access Control (RBAC) . This system enables precise delineation of access rights, ensuring that only authorized personnel can interact with specific data or AI functionalities. RBAC limits access to authorized users based on their roles in their organization. This method is commonly used in various IT systems and services, including those that provide access to LLMs through platforms or hubs designed for managing these models and their usage.
In a typical RBAC system for an LLM Hub, roles are defined based on the job functions within the organization and the access to resources that those roles require. Each role is assigned specific permissions to perform certain tasks, such as generating text, accessing billing information, managing API keys, or configuring model parameters. Users are then assigned roles that match their responsibilities and needs.
Here are some of the key features and benefits of implementing RBAC in an LLM Hub:
- By limiting access to resources based on roles, RBAC helps to minimize potential security risks. Users have access only to the information and functionality necessary for their roles, reducing the chance of accidental or malicious breaches.
- RBAC allows for easier management of user permissions. Instead of assigning permissions to each user individually, administrators can assign roles to users, streamlining the process and reducing administrative overhead.
- For organizations that are subject to regulations regarding data access and privacy, RBAC can help ensure compliance by strictly controlling who has access to sensitive information.
- Roles can be customized and adjusted as organizational needs change. New roles can be created, and permissions can be updated as necessary, allowing the access control system to evolve with the organization.
- RBAC systems often include auditing capabilities, making it easier to track who accessed what resources and when. This is crucial for investigating security incidents and for compliance purposes.
- RBAC can enforce the principle of separation of duties, which is a key security practice. This means that no single user should have enough permissions to perform a series of actions that could lead to a security breach. By dividing responsibilities among different roles, RBAC helps prevent conflicts of interest and reduces the risk of fraud or error.
Practical application: safeguarding HR Data
Let's break down a practical scenario where an LLM Hub can make a significant difference - managing HR inquiries:
- Scenario : An organization employed chatbots to handle HR-related questions from employees. These bots need access to personal employee data but must do so in a way that prevents misuse or unauthorized exposure.
- Challenge: The main concern was the risk of sensitive HR data—such as personal employee details, salaries, and performance reviews—being accessed by unauthorized personnel through the AI chatbots. This posed a significant risk to privacy and compliance with data protection regulations.
- Solution with the LLM hub :
- Controlled access: Through RBAC, only HR personnel can query the chatbot for sensitive information, significantly reducing the risk of data exposure to unauthorized staff.
- Audit trails: The system maintained detailed audit trails of all data access and user interactions with the HR chatbots, facilitating real-time monitoring and swift action on any irregularities.
- Compliance with data privacy laws: To ensure compliance with data protection regulations, the LLM Hub now includes automated compliance checks. These help to adjust protocols as needed to meet legal standards.
- Outcome: The integration of the LLM Hub at the company led to a significant improvement in the security and privacy of HR records. By strictly controlling access and ensuring compliance, the company not only safeguarded employee information but also strengthened its stance on data ethics and regulatory adherence.
Conclusion
Robust data governance is crucial as businesses embrace LLMs and AI. The LLM Hub provides a forward-thinking solution for managing the complexities of these technologies. Centralizing data governance is key to ensuring that organizations can leverage AI to improve their operational efficiency without compromising on security, privacy, or ethical standards. This approach not only helps organizations avoid potential pitfalls but also enables sustainable innovation in the AI-driven enterprise landscape.
Fleet management task with AWS IoT – overcoming limitations of Docker Virtual Networks
We’re working for a client that produces fire trucks. There is a list of requirements and the architecture proposal in the first article and a step-by-step implementation of the prototype in the second one . This time, we’re going to close the topic with DHCP implementation and UDP tests.
DHCP server and client
A major issue with Docker is the need to assign IP addresses for containers. It is impractical to rely on automatic address assignments managed by Docker or to manually set addresses when containers are started. The architecture intended for IoT edge should ensure that the state of the device can be easily reproduced even after a power failure or reboot.
It may also be necessary to set fixed addresses for containers that will be the reference point for the entire architecture - see the Router container in our previous text. It is also worth considering the scenario where an external provider wants to connect to the edge device with extra devices. As part of the collaboration, it may be necessary to provide immutable IP addresses, e.g., for IP discovery service.
Our job is to provide a service to assign IP addresses from configurable pools for both physical and virtual devices in VLANs. It sounds like DHCP and indeed, it is DHCP, but it’s not so simple with Docker. Unfortunately, Docker uses its own addressing mechanism that cannot be linked to the network DHCP server.
The proposed solution will rely on a DHCP server and a DHCP client. At startup, the script responsible for running the Docker image will call the DHCP client and receive information about the MAC address and IP address the container will have.
Ultimately, we want to get a permanent configuration that is stored as a file or some simple database for the above. This will give us an immutable configuration for the basic parameters of the Docker container. To connect the MAC address, IP address, and Docker container, we propose adding the name of the potential Docker container to the record. This will create a link for the 3 elements that uniquely identifies the Docker container.
When the script starts, it queries the DHCP server for a possible available IP address and checks beforehand if there is already a lease for the IP/MAC address determined from the Docker container name.
This achieves a configuration that is resistant to IP conflicts and guarantees the reusability of previously assigned IP addresses.
DHCP server
For our use-case, we’ve decided to rely on isc-dhcp-server package. This is a sample configuration you can adjust for your needs.
dhcpd.conf
authoritative;
one-lease-per-client true;
subnet 10.0.1.0 netmask 255.255.255.0 {
range 10.0.1.2 10.0.1.200;
option domain-name-servers 8.8.8.8, 8.8.4.4;
option routers 10.0.1.3;
option subnet-mask 255.255.255.0;
default-lease-time 3600;
max-lease-time 7200;
}
subnet 10.0.2.0 netmask 255.255.255.0 {
range 10.0.2.2 10.0.1.200;
option domain-name-servers 8.8.8.8, 8.8.4.4;
option routers 10.0.2.3;
option subnet-mask 255.255.255.0;
default-lease-time 3600;
max-lease-time 7200;
}
Here is the breakdown for each line in the mentioned configuration. There are two subnets configured with two address pools for each VLAN in our network.
authoritative - this directive means that the DHCP server is the authoritative source for the network. If a client queries with an IP address that it was given by another DHCP server, this server will tell the client that the IP address is invalid, effectively forcing the client to ask for a new IP address.
one-lease-per-client - this ensures that each client gets only one lease at a time. This helps avoid scenarios where a single client might end up consuming multiple IP addresses, leading to a reduced available IP pool.
option domain-name-servers – this assigns DNS servers to the DHCP clients. In this case, it's using Google's public DNS servers (8.8.8.8 and 8.8.4.4).
option routers – this assigns a default gateway for the DHCP clients. Devices in this network will use 10.0.1.3 as their way out of the local network, likely to reach the internet or other networks.
option subnet-mask – this specifies the subnet mask to be assigned to DHCP clients, which in this case is 255.255.255.0. It determines the network portion of an IP address.
default-lease-time – specifies how long, in seconds, a DHCP lease will be valid if the client doesn't ask for a specific lease time. Here, it's set to 3600 seconds, which is equivalent to 1 hour.
max-lease-time - this sets the maximum amount of time, in seconds, a client can lease an IP address. Here, it's 7200 seconds or 2 hours.
DHCP Client
In our scenario, all new application containers are added to the system via bash commands executed on the Host – the firetruck’s main computer or Raspberry PI in our prototype. See the previous chapter for adding containers commands reference. The command requires IP addresses and gateways for each container.
Our approach is to obtain an address from the DHCP server (as dynamic IP) and set up a container with the address configured as static IP. To achieve this, we need a shell-friendly DHCP client. We’ve decided to go with a Python script that can be called when creating new containers.
DHCP Client Example (Python)
See comments in the scripts below for explanations of each block.
from scapy.layers.dhcp import BOOTP, DHCP
from scapy.layers.inet import UDP, IP, ICMP
from scapy.layers.l2 import Ether
from scapy.sendrecv import sendp, sniff
# Sendind discovery packet for DHCP
def locate_dhcp(src_mac_addr):
packet = Ether(dst='ff:ff:ff:ff:ff:ff', src=src_mac_addr, type=0x0800) / IP(src='0.0.0.0', dst='255.255.255.255') / \
UDP(dport=67, sport=68) / BOOTP(op=1, chaddr=src_mac_addr) / DHCP(options=[('message-type', 'discover'), 'end'])
sendp(packet, iface="enp2s0")
# Receiving offer by filtering out packets packet[DHCP].options[0][1] == 2
def capture_offer():
return sniff(iface="enp2s0", filter="port 68 and port 67",
stop_filter=lambda packet: BOOTP in packet and packet[BOOTP].op == 2 and packet[DHCP].options[0][1] == 2,
timeout=5)
# Transmitting packets with accepted offer (IP) from DHCP
def transmit_request(src_mac_addr, req_ip, srv_ip):
packet = Ether(dst='ff:ff:ff:ff:ff:ff', src=src_mac_addr, type=0x0800) / IP(src='0.0.0.0', dst='255.255.255.255') / \
UDP(dport=67, sport=68) / BOOTP(op=1, chaddr=src_mac_addr) / \
DHCP(options=[('message-type', 'request'), ("client_id", src_mac_addr), ("requested_addr", req_ip),
("server_id", srv_ip), 'end'])
sendp(packet, iface="enp2s0")
# Reading acknowledgement from DHCP. Filtering out packet[BOOTP].op == 2 and packet[DHCP].options[0][1] == 5 and ports 68/67
def capture_acknowledgement():
return sniff(iface="enp2s0", filter="port 68 and port 67",
stop_filter=lambda packet: BOOTP in packet and packet[BOOTP].op == 2 and packet[DHCP].options[0][1] == 5,
timeout=5)
# Ping offered IP address
def transmit_test_packet(src_mac_addr, src_ip_addr, dst_mac_addr, dst_ip_addr):
packet = Ether(src=src_mac_addr, dst=dst_mac_addr) / IP(src=src_ip_addr, dst=dst_ip_addr) / ICMP()
sendp(packet, iface="enp2s0")
if __name__ == "__main__":
# dummy mac address
mac_addr = "aa:bb:cc:11:22:33"
print("START")
print("SEND: Discover")
locate_dhcp(mac_addr)
print("RECEIVE: Offer")
received_packets = capture_offer()
server_mac_addr = received_packets[0]["Ether"].src
bootp_response = received_packets[0]["BOOTP"]
server_ip_addr = bootp_response.siaddr
offered_ip_addr = bootp_response.yiaddr
print("OFFER:", offered_ip_addr)
print("SEND: Request for", offered_ip_addr)
transmit_request(mac_addr, offered_ip_addr, server_ip_addr)
print("RECEIVE: Acknowledge")
received_packets2 = capture_acknowledgement()
print("ACKNOWLEDGE:", offered_ip_addr)
print("SEND: Test IP Packet")
transmit_test_packet(mac_addr, offered_ip_addr, server_mac_addr, server_ip_addr)
print("END")
Let’s talk about our use case.
The business requirement is to add another device to the edge - perhaps a thermal imaging camera. Our assumption is to guarantee as fully automatic onboarding of the device in our system as possible. Adding a new device will also mean, in our case, connecting it to the customer-provided Docker container.
Our expected result is to get a process that registers the new Docker container with the assigned IP address from the DHCP server. The IP address is, of course, dependent on the VLAN in which the new device will be located.
In summary, it is easy to see that plugging in a new device at this point just means that the IP address is automatically assigned and bound. The new device is aware of where the Router container is located - so communication is guaranteed from the very beginning.
UDP broadcast and multicast setup
Broadcast UDP is a method for sending a message to all devices on a network segment, which allows for efficient communication and discovery of other devices on the same network. In an IoT context, this can be used for the discovery of devices and services, such as finding nearby devices for data exchange or sending a command to all devices in a network.
Multicast, on the other hand, allows for the efficient distribution of data to a group of devices on a network. This can be useful in scenarios where the same data needs to be sent to multiple devices at the same time, such as a live video stream or a software update.
One purpose of the architecture was to provide a seamless, isolated, LAN-like environment for each application. Therefore, it was critical to enable applications to use not only direct, IP, or DNS-based communication but also to allow multicasting and broadcasting messages. These protocols enable devices to communicate with each other in a way that is scalable and bandwidth-efficient, which is crucial for IoT systems where there may be limited network resources available.
The presented architecture provides a solution for dockerized applications that use UDP broadcast/multicast. The router Docker container environment is intended to host applications that are to distribute data to other containers in the manner.
Let’s check whether those techniques are available to our edge networks.
Broadcast
The test phase should start on the Container1 container with an enabled UDP listener. For that, run the command.
nc -ulp 5000
The command uses the netcat (nc) utility to listen (-l) for incoming UDP (-u) datagrams on port 5000 (-p 5000).
Then, let’s produce a message on the Router container.
echo -n "foo" | nc -uv -b -s 10.0.1.3 -w1 10.0.1.255 5000
The command above is an instruction that uses the echo and netcat to send a UDP datagram containing the string "foo" to all devices on the local network segment.
Breaking down the command:
echo -n "foo" - This command prints the string "foo" to standard output without a trailing newline character.
nc - The nc command is used to create network connections and can be used for many purposes, including sending and receiving data over a network.
-uv - These options specify that nc should use UDP as the transport protocol and that it should be run in verbose mode.
-b - This option sets the SO_BROADCAST socket option, allowing the UDP packet to be sent to all devices on the local network segment.
-s 10.0.1.3 - This option sets the source IP address of the UDP packet to 10.0.1.3.
-w1 - This option sets the timeout for the nc command to 1 second.
10.0.1.255 - This is the destination IP address of the UDP packet, which is the broadcast address for the local network segment.
5000 - This is the destination port number for the UDP packet.
Please note that both source and destination addresses belong to VLAN 1. Therefore, the datagram is sent via the eth0 interface to this VLAN only.
The expected result is the docker container Container1 receiving the message from the Router container via UDP broadcast.
Multicast
Let's focus on Docker Container parameters specified when creating containers (Docker containers [execute on host] sub-chapter in the previous article ). In the context of Docker containers, the --sysctl net.ipv4.icmp_echo_ignore_broadcasts=0 option is crucial if you need to enable ICMP echo requests to the broadcast address inside the container. For example, if your containerized application relies on UDP broadcast for service discovery or communication with other containers, you may need to set this parameter to 0 to allow ICMP echo requests to be sent and received on the network.
Without setting this parameter to 0, your containerized application may not be able to communicate properly with other containers on the network or may experience unexpected behavior due to ICMP echo requests being ignored. Therefore, the --sysctl net.ipv4.icmp_echo_ignore_broadcasts=0 option can be crucial in certain Docker use cases where ICMP echo requests to the broadcast address are needed.
Usage example
Run the command below in the container Container1 (see previous chapter for naming references). We use socat, which is a command line utility that establishes a bidirectional byte stream and transfers data between them. Please note that the IP address of the multicast group does not belong to the VLAN 1 address space.
socat -u UDP4-RECV:22001,ip-add-membership=233.54.12.234:eth0 /dev/null &
Then, add the route to the multicast group.
ip route add 233.54.12.234/32 dev eth0
You can ping the address from Device 1 to verify the group has been created.
ping -I eth0 -t 2 233.54.12.234
As you can see, an interface parameter is required with the ping command to enforce using the correct outgoing interface. You can also limit the TTL parameter (-t 2) to verify the route length to the multicast group.
Now, use socat on Device1 to open the connection inside the group.
ip route add 233.54.12.234/32 dev eth0
socat STDIO UDP-DATAGRAM:233.54.12.234:22001
Please note you have to setup the route to avoid sending packets to “unknown network” directly to the router.
Now, you can type the message on Device1 and use tcpdump on Container1 to see the incoming message.
tcpdump -i eth0 -Xavvv

Summary
Nowadays, a major challenge faced by developers and customers is to guarantee maximum security while ensuring compatibility and openness to change for edge devices. As part of IoT, it is imperative to keep in mind that the delivered solution may be extended in the future with additional hardware modules, and thus, the environment into which this module will be deployed must be ready for changes.
This problem asks the non-trivial question of how to meet business requirements while taking into account all the guidelines from standards from hardware vendors or the usual legal standards.
Translating the presented architecture into a fire trucks context, all the requirements from the introduction regarding isolation and modularity of the environment have been met. Each truck has the ability to expand the connected hardware while maintaining security protocols. In addition, the Docker images that work with the hardware know only their private scope and the router's scope.
The proposed solution provides a ready answer on how to obtain a change-ready environment that meets security requirements. A key element of the architecture is to guarantee communication for applications only in the VLAN space in which they are located.
This way, any modification should not affect already existing processes on the edge side. It is also worth detailing the role played by the Router component. With it, we guarantee a way to communicate between Docker containers while maintaining a configuration that allows you to control network traffic.
We have also included a solution for UDP Broadcast / Multicast communication. Current standards among hardware include solutions that transmit data via the standard. This means that if, for example, we are waiting for emergency data on a device, we must also be ready to handle Broadcasts and ensure that packets are consumed only by those components that are designed for this purpose.
Summarizing the presented solution, one should not forget about applications in other industries as well. The idea of independent Docker images and modularity for hardware allows application even in the Automotive and high-reliability areas, where the use of multiple devices, not necessarily from the same supplier, is required.
We encourage you to think about further potential applications and thank you for taking the time to read.


Exploring Texas Instruments Edge AI: Hardware acceleration for efficient computation
In recent years, the field of artificial intelligence (AI) has witnessed a transformative shift towards edge computing, enabling intelligent decision-making to occur directly on devices rather than relying solely on cloud-based solutions. Texas Instruments, a key player in the semiconductor industry, has been at the forefront of developing cutting-edge solutions for Edge AI. One of the standout features of their offerings is the incorporation of hardware acceleration for efficient computation, which significantly improves the performance of AI models on resource-constrained devices.
Pros and cons of running AI models on embedded devices vs. cloud
In the evolving landscape of artificial intelligence , the decision to deploy models on embedded devices or rely on cloud-based solutions is a critical consideration. This chapter explores the advantages and disadvantages of running AI models on embedded devices, emphasizing the implications for efficiency, privacy, latency, and overall system performance.
Advantages of embedded AI
- Low Latency
One of the primary advantages of embedded AI is low latency. Models run directly on the device, eliminating the need for data transfer to and from the cloud. This results in faster response times, making embedded AI ideal for applications where real-time decision-making is crucial. - Privacy and Security
Embedded AI enhances privacy by processing data locally on the device. This mitigates concerns related to transmitting sensitive information to external servers. Security risks associated with data in transit are significantly reduced, contributing to a more secure AI deployment. - Edge Computing Efficiency
Utilizing embedded AI aligns with the principles of edge computing. By processing data at the edge of the network, unnecessary bandwidth usage is minimized, and only relevant information is transmitted to the cloud. This efficiency is especially beneficial in scenarios with limited network connectivity. What’s more, some problems are very inefficient to solve on cloud-based AI models, for example: video processing with real time output. - Offline Functionality
Embedded AI allows for offline functionality, enabling devices to operate independently of internet connectivity. This feature is advantageous in remote locations or environments with intermittent network access, as it expands the range of applications for embedded AI. - Reduced Dependence on Network Infrastructure
Deploying AI models on embedded devices reduces dependence on robust network infrastructure. This is particularly valuable in scenarios where maintaining a stable and high-bandwidth connection is challenging or cost ineffective. AI feature implemented on the cloud platform will be unavailable in the car after the connection is lost.
Disadvantages of embedded AI
- Lack of Scalability
Scaling embedded AI solutions across a large number of devices can be challenging. Managing updates, maintaining consistency, and ensuring uniform performance becomes more complex as the number of embedded devices increases. - Maintenance Challenges
Updating and maintaining AI models on embedded devices can be more cumbersome compared to cloud-based solutions. Remote updates may be limited, requiring physical intervention for maintenance, which can be impractical in certain scenarios. - Initial Deployment Cost
The initial cost of deploying embedded AI solutions, including hardware and development, can be higher compared to cloud-based alternatives. However, this cost may be offset by long-term benefits, depending on the specific use case and scale. - Limited Computational Power
Embedded devices often have limited computational power compared to cloud servers. This constraint may restrict the complexity and size of AI models that can be deployed on these devices, impacting the range of applications they can support. - Resource Constraints
Embedded devices typically have limited memory and storage capacities. Large AI models may struggle to fit within these constraints, requiring optimization or compromising model size for efficient deployment.
The decision to deploy AI models on embedded devices or in the cloud involves careful consideration of trade-offs. While embedded AI offers advantages in terms of low latency, privacy, and edge computing efficiency, it comes with challenges related to scalability, maintenance, and limited resources.
However, chipset manufacturers are constantly engaged in refining and enhancing their products by incorporating specialized modules dedicated to hardware-accelerated model execution. This ongoing commitment to innovation aims to significantly improve the overall performance of devices, ensuring that they can efficiently run AI models. The integration of these hardware-specific modules not only promises comparable performance but, in certain applications, even superior efficiency.
Deploy AI model on embedded device workflow
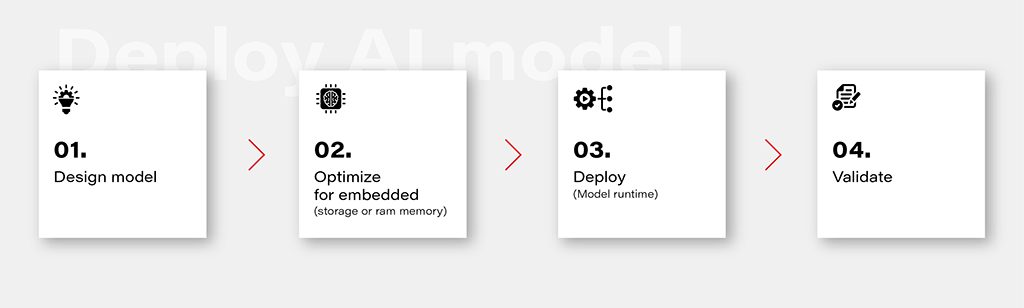
1. Design Model
Designing an AI model is the foundational step in the workflow. This involves choosing the appropriate model architecture based on the task at hand, whether it's classification, regression, or other specific objectives. This is out of the topic for this article.
2. Optimize for Embedded (Storage or RAM Memory)
Once the model is designed, the next step is to optimize it for deployment on embedded devices with limited resources. This optimization may involve reducing the model size, minimizing the number of parameters, or employing quantization techniques to decrease the precision of weights. The goal is to strike a balance between model size and performance to ensure efficient operation within the constraints of embedded storage and RAM memory.
3. Deploy (Model Runtime)
Deploying the optimized model involves integrating it into the embedded system's runtime environment. While there are general-purpose runtime frameworks like TensorFlow Lite and ONNX Runtime, achieving the best performance often requires leveraging dedicated frameworks that utilize hardware modules for accelerated computations. These specialized frameworks harness hardware accelerators to enhance the speed and efficiency of the model on embedded devices.
4. Validate
Validation is a critical stage in the workflow to ensure that the deployed model performs effectively on the embedded device. This involves rigorous testing using representative datasets and scenarios. Metrics such as accuracy, latency, and resource usage should be thoroughly evaluated to verify that the model meets the performance requirements. Validation helps identify any potential issues or discrepancies between the model's behavior in the development environment and its real-world performance on the embedded device.
Deploy model on Ti Edge AI and Jacinto 7
Deploying an AI model on Ti Edge AI and Jacinto 7 involves a series of steps to make the model work efficiently with both regular and specialized hardware. In simpler terms, we'll walk through how the model file travels from a general Linux environment to a dedicated DSP core, making use of special hardware features along the way.
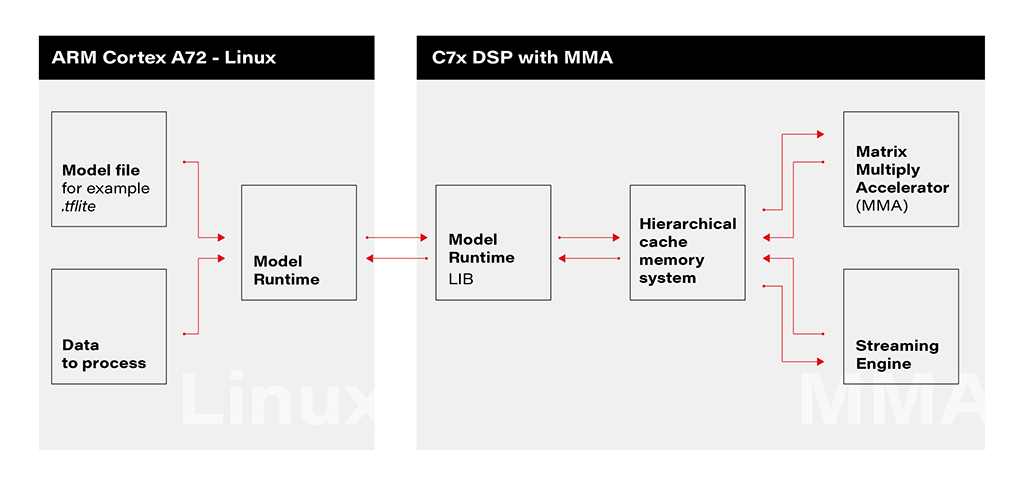
1. Linux Environment on A72 Core: The deployment process initiates within the Linux environment running on the A72 core. Here, a model file resides, ready to be utilized by the application's runtime. The model file, often in a standardized format like .tflite, serves as the blueprint for the AI model's architecture and parameters.
2. Runtime Application on A72 Core: The runtime application, responsible for orchestrating the deployment, receives the model file from the Linux environment. This runtime acts as a proxy between the user, the model, and the specialized hardware accelerator. It interfaces with the Linux environment, handling the transfer of input data to be processed by the model.
3. Connection to C7xDSP Core: The runtime application establishes a connection with its library executing on the C7xDSP core. This library, finely tuned for hardware acceleration, is designed to efficiently process AI models using specialized modules such as the Matrix Multiply Accelerator.
4. Loading Model and Data into Memory: The library on the C7x DSP core receives the model description and input data, loading them into memory for rapid access. This optimized memory utilization is crucial for achieving efficient inference on the dedicated hardware.
5. Computation with Matrix Multiply Accelerator: Leveraging the power of the Matrix Multiply Accelerator, the library performs the computations necessary for model inference. The accelerator efficiently handles matrix multiplications, a fundamental operation in many neural network models.
The matrix multiply accelerator (MMA) provides the following key features:
- Support for a fully connected layer using matrix multiply with arbitrary dimension
- Support for convolution layer using 2D convolution with matrix multiply with read panel Support for ReLU non-linearity layer OTF
- Support for high utilization (>85%) for a typical convolutional neural network (CNN), such as AlexNet, ResNet, and others
- Ability to support any CNN network topologies limited only by memory size and bandwidth
6. Result Return to User via Runtime on Linux: Upon completion of computations, the results are returned to the user through the runtime application on the Linux environment. The inference output, processed with hardware acceleration, provides high-speed, low-latency responses for real-time applications.
Object recognition with AI model on Jacinto 7: Real-world challenges
In this chapter, we explore a practical example of deploying an AI model on Jacinto 7 for object recognition. The model is executed according to the provided architecture, utilizing the TVM-CL-3410-gluoncv-mxnet-mobv2 model from the Texas Instruments Edge AI Model Zoo. The test images capture various scenarios, showcasing both successful and challenging object recognition outcomes.
The deployment architecture aligns with the schematic provided, incorporating Jacinto 7's capabilities to efficiently execute the AI model. The TVM-CL-3410-gluoncv-mxnet-mobv2 model is utilized, emphasizing its pre-trained nature for object recognition tasks.
Test Scenarios: A series of test images were captured to evaluate the model's performance in real-world conditions. Notably:
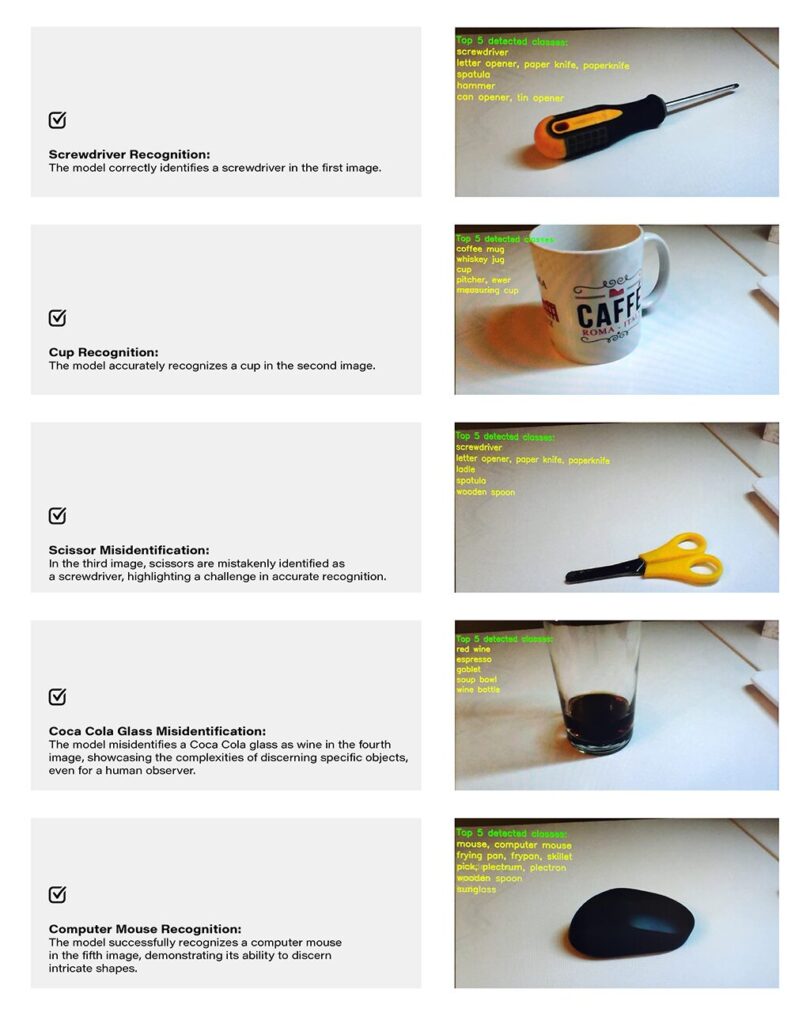
Challenges and Real-world Nuances: The test results underscore the challenges of accurate object recognition in less-than-ideal conditions. Factors such as image quality, lighting, and ambiguous object appearances contribute to the intricacy of the task. The third and fourth images, where scissors are misidentified as a screwdriver, and a Coca-Cola glass is misrecognized as wine, exemplify situations where even a human might face difficulty due to limited visual information-
Quality Considerations: The achieved results are noteworthy, considering the less-than-optimal quality of the test images. The chosen camera quality and lighting conditions intentionally mimic challenging real-world scenarios, making the model's performance commendable.
Conclusion: The real-world example of object recognition on Jacinto 7 highlights the capabilities and challenges associated with deploying AI models in practical scenarios. The successful identification of objects like a screwdriver, cup, and computer mouse demonstrates the model's efficacy. However, misidentifications in challenging scenarios emphasize the need for continuous refinement and adaptation, acknowledging the intricacies inherent in object recognition tasks, especially in dynamic and less-controlled environments.
How to develop AI-driven personal assistants tailored to automotive needs. Part 3
Blend AI assistant concepts together
This series of articles starts with a general chatbot description – what it is, how to deploy the model, and how to call it. The second part is about tailoring – how to teach the bot domain knowledge and how to enable it to execute actions. Today, we’ll dive into the architecture of the application, to avoid starting with something we would regret later on.
To sum up, there are three AI assistant concepts to consider: simple chatbot, RAG, and function calling.
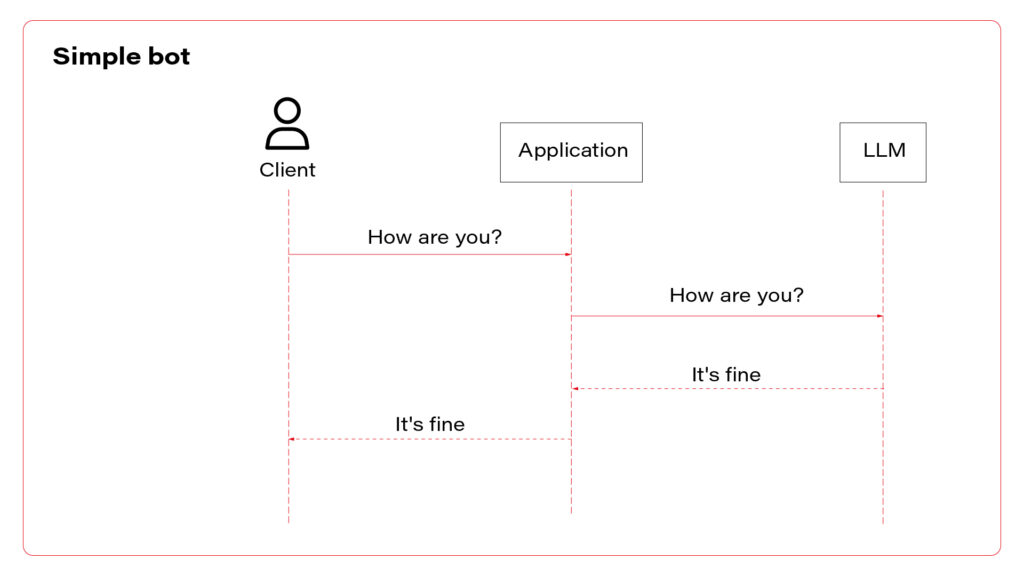
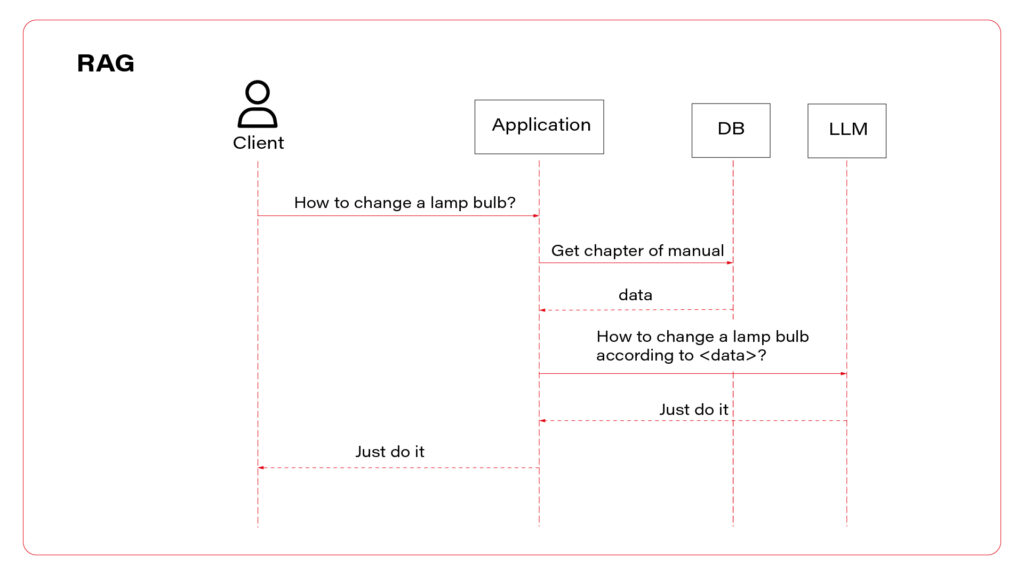
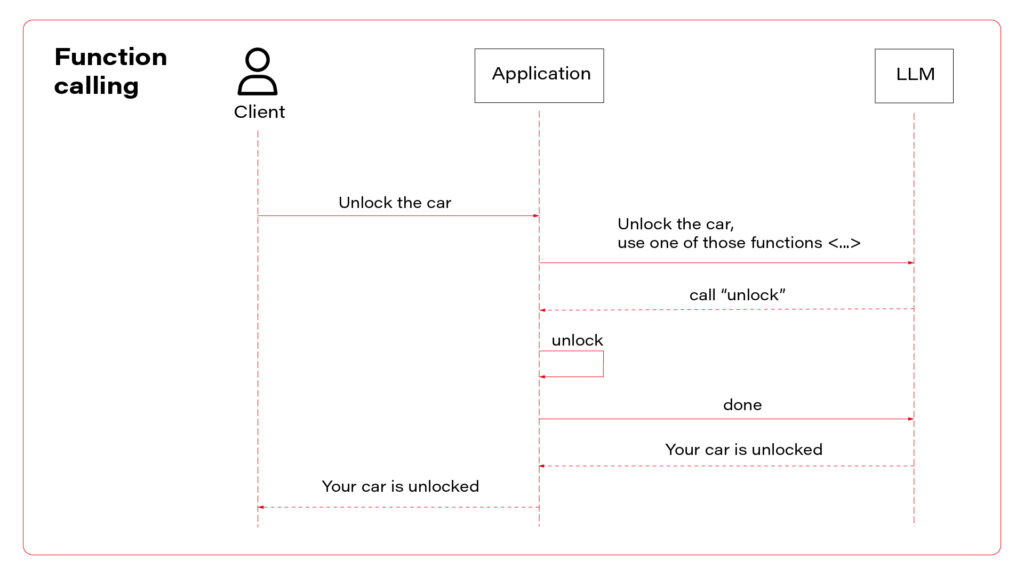
I propose to use them all at once. Let’s talk about the architecture. The perfect one may look as follows.
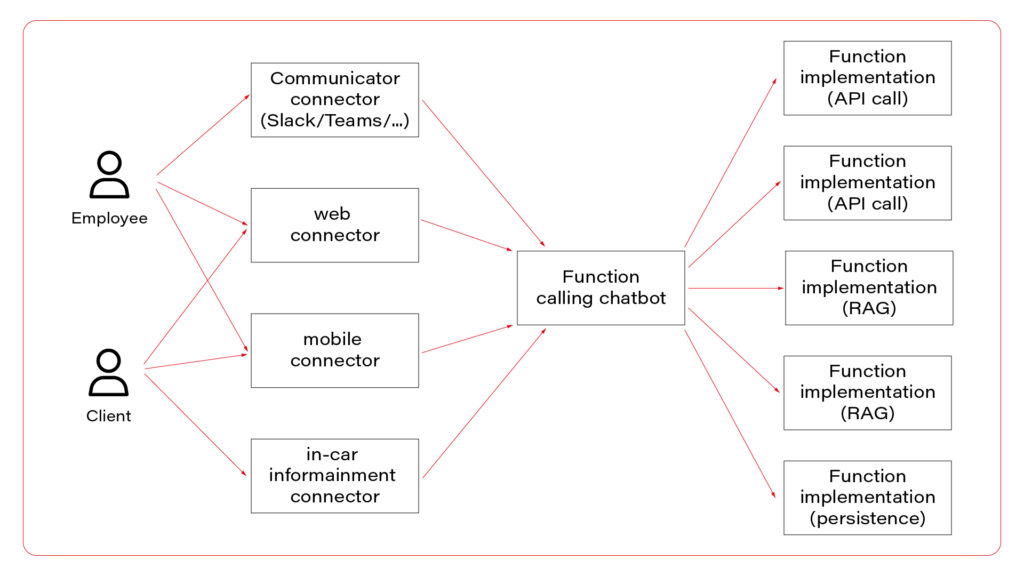
In the picture, you can see three layers. The first one, connectors, is responsible for session handling. There are some differences between various UI layers, so it’s wise to keep them small, simple, and separated. Members of this layer may be connected to a fast database, like Redis, to allow session sharing between nodes, or you can use a server-side or both-side communication channel to keep sessions alive. For simple applications, this layer is optional.
The next layer is the chatbot – the “main” application in the system. This is the application connected to the LLM, implementing the function calling feature. If you use middleware between users and the “main” application, this one may be stateless and receive the entire conversation from the middleware with each call. As you can see, the same application serves its capabilities both to employees and clients.
Let’s imagine a chatbot dedicated to recommending a car. Both a client and a dealer may use a very similar application, but the dealer has more capabilities – to order a car, to see stock positions, etc. You don’t need to create two different applications for that. The concept is the same, the architecture is the same, and the LLM client is the same. There are only two elements that differ: system prompts and the set of available functions. You can play it through a simple abstract factory pattern that will provide different prompts and function definitions for different users.
In a perfect world, the last layer is a set of microservices to handle different functions. If the LLM decides to use the function “store_order”, the “main” application calls the “store_order” function microservice that inserts data to an order database. Suppose the LLM decides to use the function “honk_and_flash” to localize a car in a crowded parking. In that case, the “main” application calls the “hong_and_flash” function microservice that handles authorization and calls a Digital Twin API to execute the operation in the car. If the LLM decides to use a function “check_in_user_manual”, the “main” application calls the “check_in_user_manual” function microservice, which is… another LLM-based application!
And that’s the point!
A side note before we move on – the world is never perfect so it’s understandable if you won’t implement each function as a separate microservice and e.g. keep everything in the same application.
The architecture proposed can combine all three AI assistant concepts. The “main” application may answer questions based on general knowledge and system prompts (“simple chatbot” concept) or call a function (“function calling” concept). The function may collect data based on the prompt (“RAG” concept) and do one of the following: call LLM to answer a question or return the data to add it to the context to let the “main” LLM answer the question. Usually, it’s better to follow the former way – to answer the question and not to add huge documents to the context. But for special use cases, like a long conversation about collected data, you may want to keep the document in the context of the conversation.
Which brings us to the last idea – mutable context. In general, each call contains the conversation history, including all data collected during the conversation, together with all available functions’ definitions.
First prompt:
System: You are a car seller, be nice to your customers
User: I’d like to buy a car
Functions: function1, function2, function3
Second prompt:
System: You are a car seller, be nice to your customers
User: I’d like to buy a car
Assistant: call function1
Function: function1 returned data
Assistant: Sure, what do you need?
User: I’m looking for a sports car.
Functions: function1, function2, function3
Third prompt:
System: You are a car seller, be nice to your customers
User: I’d like to buy a car
Assistant: call function1
Function: function1 returned data
Assistant: Sure, what do you need?
User: I’m looking for a sports car.
Assistant: I propose model A, it’s fast and furious
User: I like it!
Functions: function1, function2, function3
You can consider a mutation of the conversation context at this point.
Fourth prompt:
System: You are a sports car seller, be nice to your customers
System: User is looking for a sports car and he likes model A
Assistant: Do you want to order model A?
Functions: function1, function2, function3, function4
You can implement a summarization function in your code to shorten the conversation, or you can select different subsets of all functions available, depending on the conversation context. You can perform both those tasks with the same LLM instance you use to make the conversation but with totally different prompts, e.g. “Summarize the conversation” instead of “You are a car seller”. Of course, the user won’t even see that your application calls the LLM more often than on user prompts only.
Pitfalls
All techniques mentioned in the series of articles may be affected by some drawbacks.
The first one is the response time . When you put more data into the context, the user waits longer for the responses. It’s especially visible for voice-driven chatbots and may influence the user experience. Which means - it’s more important for customer-facing chatbots than the ones for internal usage only.
The second inhibition is cost . Today, the 1000 prompt tokens processed by GPT-4-Turbo cost €0,01, which is not a lot. However, a complex system prompts together with some user data may, let’s say, occupy 20000 tokens. Let’s assume that the first question takes 100 tokens, the first answer takes 150 tokens, and the second question takes 200 tokens. The cost of the conversation is calculated as follows.
First prompt: common data + first question = 20000 [tokens] + 100 [tokens] = 2100 [tokens]
Second prompt: common data + first question + first answer + second question = 20000 [tokens] + 100 [tokens] + 150 [tokens] + 200 [tokens] = 20450 [tokens]
This two-prompts conversation takes 40550 tokens in total so far, which costs €0,41, excluding completions. Be aware that users may play with your chatbot running up the bill.
The last risk is the security risk . In the examples in the part 2 article , the chatbot uses an “unlock” function that accepts a VIN. You are obliged to assume that the chatbot will try to call a function with the VIN parameter of a car that does not belong to the customer. Of course, you must implement various LLM-hacking prevention mechanisms (prompt engineering, prompt filtering, answer filtering, etc.), but you can never assume that it is sufficient. Therefore, the developer’s role is to secure the functions (function calling) and data sources (RAG). For example, if a user tries to call a vehicle-related function, the user should be identified by the OAuth2 token, and the function microservice should reject a call with a VIN argument that doesn’t match the user profile.
Outline
In this series of articles, I’ve given you a few examples of how to utilize the most significant invention of 2023 for your automotive clients. You can write a chatbot that analyses customers’ requirements, helps mechanics, automates maintenance visit scheduling, seeks answers in user manuals, or writes personalized emails. Large language models are powerful and may be customized with a little effort. On the other hand, you need to keep in mind their limitations and common pitfalls. At the end of the day, even if the engine of the application is a black box, there is still a lot to implement around it to meet the business requirements.
The era of LLM-based applications is started within the automotive industry too.
How to develop AI-driven personal assistants tailored to automotive needs. Part 2
Making the chatbot more suitable
Recently we’ve built a simple chatbot , using an Azure-hosted GPT 4 Turbo instance. It’s a great starting point, but we definitely need more to fulfill any business requirements. Let’s try to talk with our bot.
Prompt:
Hi, I’d like to buy a new car. Can you assist me with a choice? I’m looking for a family car with a hybrid powertrain and all-wheel drive. I’m a fan of modern design and fancy features. My budget is around 70k euro.
Completion:
Absolutely, I’d be happy to help you find a suitable family car that meets your criteria! Given your preferences (…), there are several options across different brands that could be a great fit. (…):
1. Audi Q5 TFSI e
Powertrain: (…)
Features: (…)
Price Range: (…)
2. BMW X5 xDrive45e
Powertrain: (…)
Features: (…)
Price Range: (…)
3. Volvo XC90 Recharge
Powertrain: (…)
Features: (…)
Price Range: (…)
4. Mercedes-Benz GLE 450 4MATIC
Powertrain: (…)
Features: (…)
Price Range: (…)
5. Lexus RX 450h
Powertrain: (…)
Features: (…)
Price Range: (…)
When considering these options, it’s important to test drive the ones you’re most interested in to get a feel for their driving dynamics, comfort, and the user-friendliness of their tech features. Additionally, (…)
As you can see, the response is quite long, versatile, and absolutely useless.
If you’re working for one of those brands, you don’t want the chatbot to offer your competitors. Also, the knowledge base is a bit outdated, so the answer is unreliable. Besides that, the answer is too long to be shown on a mobile device or to be read. And you need to be aware that the user may misuse the chatbot to generate a master thesis, write a fairy tale or plan a trip to Rome.
Our job is to limit the bot possibilities. The way to achieve it is prompt engineering. Let’s try to add some system messages before the user prompt.
Messages=[
{"role": "system", "content": "You are a car seller working for X"},
{"role": "system", "content": "X offers following vehicles (…)"},
{"role": "system", "content": "Never recommend X competitors"},
{"role": "system", "content": "Avoid topics not related to X. e.g. If the user asks for weather, kindly redirect him to the weather service"},
{"role": "system", "content": "Be strict and accurate, avoid too long messages"},
{"role": "user", "content": "Hi, I’d like to buy a new car. Can you assist me with a choice? I’m looking for a family car with a hybrid powertrain and all-wheel drive. I’m a fan of modern design and fancy features. My budget is around 70k euro."},
]
Now the chatbot should behave much better, but it still can be tricked. Advanced prompt engineering, together with LLM hacking and ways to prevent it, is out of the scope of this article, but I strongly recommend exploring this topic before exposing your chatbot to real customers. For our purposes, you need to be aware that providing an entire offer in a prompt (“X offers following vehicles (…)”) may go way above the LLM context window. Which brings us to the next point.
Retrieval augmented generation
You often want to provide more information to your chatbot than it can handle. It can be an offer of a brand, a user manual, a service manual, or all of that put together, and much more. GPT 4 Turbo can work on up to 128 000 tokens (prompt + completion together), which is, according to the official documentation , around 170 000 of English words. However, the accuracy of the model decreases around half of it [source] , and the longer context processing takes more time and consumes more money. Google has just announced a 1M tokens model but generally speaking, putting too much into the context is not recommended so far. All in all, you probably don’t want to put there everything you have.
RAG is a technique of collecting proper input for the LLM that may contain information required to answer the user questions.
Let’s say you have two documents in your company knowledge base. The first one contains the company offer (all vehicles for sale), and the second one contains maintenance manuals. The user approaches your chatbot and asks the question: “Which car should I buy?”. Of course, the bot needs to identify user’s needs, but it also needs some data to work on. The answer is probably included in the first document but how can we know that?
In more detail, RAG is a process of comparing the question with available data sources to find the most relevant one or ones. The most common technique is vector search. This process converts your domain knowledge to vectors and stores them in a database (this process is called embedding). Each vector represents a piece of document – one chapter, one page, one paragraph, depending on your implementation. When the user asks his question, it is also converted to a vector representation. Then, you need to find the document represented by the most similar vector – it should contain the response to the question, so you need to add it to the context. The last part is the prompt, e.g. “Basic on this piece of knowledge, answer the question”.
Of course, the matter is much more complicated. You need to consider your embedding model and maybe improve it with fine-tuning. You need to compare search methods (vector, semantic, keywords, hybrid) and adapt them with parameters. You need to select the best-fitting database, polish your prompt, convert complex documents to text (which may be challenging, especially with PDFs), and maybe process the output to link to sources or extract images.
It's challenging but possible. See the result in one of our case studies: Voice-Driven Car Manual .
Good news is – you’re not the first one working on this issue, and there are some out-of-the-box solutions available.
The no-code one is Azure AI Search, together with Azure Cognitive Service and Azure Bot. The official manual covers all steps – prerequisites, data ingestion, and web application deployment. It works well, including OCR, search parametrization, and exposing links to source documents in chat responses. If you want a more flexible solution, the low-code version is available here .
I understand if you want to keep all the pieces of the application in your hands and you prefer to build it from scratch. At this point we need to move back to the language opting. The Langchain library, which was originally available for Python only, may be your best friend for this implementation.
See the example below.
From langchain.chains.question_answering import load_qa_chain
from langchain.embeddings import HuggingFaceEmbeddings
from langchain.vectorstores import Qdrant
from qdrant_client import QdrantClient
from langchain.chat_models import AzureChatOpenAI
from langchain.chains.retrieval_qa.base import RetrievalQA
client = QdrantClient(url="…", api_key="…")
embeddings = HuggingFaceEmbeddings(model_name="hkunlp/instructor-xl")
db = Qdrant(client= client, collection_name="…", embeddings=embeddings)
second_step = load_qa_chain(AzureChatOpenAI(
deployment_name="…",
openai_api_key="…",
openai_api_base="…",
openai_api_version="2023-05-15"
), chain_type="stuff", prompt="Using the context {{context}} answer the question: …")
first_step = RetrievalQA(
combine_documents_chain=second_step,
retriever=db.as_retriever(
search_type="similarity_score_threshold", search_kwargs={"score_threshold": 0.5 }
),
)
first_step.run()
This is the entire searching application. It creates and executes a “chain” of operations – the first step is to look for data in the Qdrant database, using a model called instructor-xl for embedding. The second step is to put the output of the first step as a “context” to the GPT prompt. As you can see, the application is based on the Langchain library. There is a Java port for it, or you can execute each step manually in any language you want. However, using Langchain in Python is the most convenient way to follow and a significant advantage of using this language at all.
With this knowledge you can build a chatbot and feed it with company knowledge. You can aim the application for end users (car owners), internal employees, or potential customers. But LLM can “do” more.
Function calling
To “do” is the keyword. In this section we’ll teach the LLM to do something for us, not only to provide information or tell jokes . An operational chatbot can download more data if needed and decide which data is required for the conversation, but it can also execute real operations. Most modern vehicles are delivered with mobile applications that you can use to read data (localize the car, check the mileage, read warnings) or to execute operations (open doors, turn on air conditioning, or start charging process). Let’s do the same with the chatbot.
Function calling is a built-in functionality of GPT models. There is a field in the API model for tools (functions), and it can produce responses in a JSON format. You can try to achieve the same with any other LLM with a prompt like that.
In this environment, you have access to a set of tools you can use to answer the user's question.
You may call them like this:
<function_calls>
<invoke>
<tool_name>$TOOL_NAME</tool_name>
<parameters>
<$PARAMETER_NAME>$PARAMETER_VALUE</$PARAMETER_NAME>
</parameters>
</invoke>
</function_calls>
Here are the tools available:
<tools>
<tool_description>
<tool_name>unlock</tool_name>
<description>
Unlocks the car.
</description>
<parameters>
<parameter>
<name>vin</name>
<type>string</type>
<description>Car identifier</description>
</parameter>
</parameters>
</tool_description>
</tools>
This is a prompt from the user: ….
Unfortunately, LLMs often don’t like to follow a required structure of completions, so you might face some errors when parsing responses.
With the GPT, the official documentation recommends verifying the response format, but I’ve never encountered any issue with this functionality.
Let’s see a sample request with functions’ definitions.
{
"model": "gpt-4",
"messages": [
{ "role": "user", "content": "Unlock my car" }
],
"tools": [
{
"type": "function",
"function": {
"name": "unlock",
"description": "Unlocks the car",
"parameters": {
"type": "object",
"properties": {
"vin": {
"type": "string",
"description": "Car identifier"
},
"required": ["vin"]
}
}
}
],
}
To avoid making the article even longer, I encourage you to visit the official documentation for reference.
If the LLM decides to call a function instead of answering the user, the response contains the function-calling request.
{
…
"choices": [
{
"index": 0,
"message": {
"role": "assistant",
"content": null,
"tool_calls": [
{
"id": "call_abc123",
"type": "function",
"function": {
"name": "unlock",
"arguments": "{\"vin\": \"ABC123\"}"
}
}
]
},
"logprobs": null,
"finish_reason": "tool_calls"
}
]
}
Based on the finish_reason value, your application decides to return the content to the user or to execute the operation. The important fact is – there is no magic that can be used to automatically call some API or execute a function in your code. Your application must find a function based on the name, and parse arguments from the JSON-formatted list. Then the response of the function should be sent to the LLM (not to the user), and the LLM makes the decision about next steps – to call another function (or the same with different arguments) or to write a response for the user. To send the response to the LLM, just add it to the conversation.
{
"model": "gpt-4",
"messages": [
{ "role": "user", "content": "Unlock my car" },
{"role": "assistant", "content": null, "function_call": {"name": "unlock", "arguments": "{\"vin\": \"ABC123\"}"}},
{"role": "function", "name": "unlock", "content": "{\"success\": true}"}
],
"tools": [
…
],
}
In the example above, the next response is more or less “Sure, I’ve opened your car”.
With this approach, you need to send with each request not only the conversation history and system prompts but also a list of all functions available with all parameters. Keep it in mind when counting your tokens.
Follow up
As you can see, we can limit the chatbot versatility by prompt engineering and boost its resourcefulness with RAG or external tools. It brings us to another level of LLMs usability but now we need to meld it together and not throw the baby out with the bathwater. In the last article we’ll consider the application architecture, plug some optimization, and evade common pitfalls. We’ll be right back!
How to develop AI-driven personal assistants tailored to automotive needs. Part 1
Artificial Intelligence is everywhere - my laundry dryer is “powered by AI” (whatever it means), and I suppose there are some fridges on the market that take photos of their content to send you a shopping list and maybe even propose a recipe for your next dinner basing on the food you have. Some people say that generative AI and large language models (LLMs) are the most important inventions since the Internet, and we observe the beginning of the next industrial revolution.
However, household appliances and the newest history deliberation are not in our sphere of interest. The article about AI-based tools to support developers is getting old quickly due to the extremely fast development of new tools and their capabilities. But what can we, software makers, propose to our customers to keep up with the world changing?
Let’s talk about chatbots. Today, we try to break down an AI-driven personal assistants topic for the automotive industry. First, to create a chatbot, we need a language model.
The best-known LLM is currently OpenAI GPT4 that powers ChatGPT and thousands of different tools and applications, including a very powerful, widely available Microsoft Copilot. Of course, there are more similar models: Anthropic Claude with a huge context window, recently updated Google Bard, available for self-hosting Llama, code-completion tailored Tabnine, etc.
Some of them can give you a human-like conversation experience, especially combined with voice recognition and text-to-speech models – they are smart, advanced, interactive, helpful, and versatile. Is it enough to offer an AI-driven personal assistant for your automotive customers?
Well, as usual, it depends.
What is a “chatbot”?
The first step is to identify end-users and match their requirements with the toolkit possibilities. Let’s start with the latter point.
We’re going to implement a text-generating tool, so in this article, we don’t consider graphics, music, video, and all other generation models. We need a large language model that “understands” a natural language (or more languages) prompts and generates natural language answers (so-called “completions”).
Besides that, the model needs to operate on the domain knowledge depending on the use case. Hypothetically, it’s possible to create such a model from scratch, using general resources, like open-licensed books (to teach it the language) and your company resources (to teach it the domain), but the process is complex, very expensive in all dimensions (people, money, hardware, power, time, etc.) and at the end of the day - unpredictable.
Therefore, we’re going to use a general-purpose model. Some models (like gpt-4-0613) are available for fine-tuning – a process of tailoring the model to better understand a domain. It may be required for your use case, but again, the process may be expensive and challenging, so I propose giving a shot at a “standard” model first.
Because of the built-in function calling functionality and low price with a large context window, in this article, we use gpt-4-turbo. Moreover, you can have your own Azure-hosted instance of it, which is almost certainly significant to your customer privacy policy. Of course, you can achieve the same with some extra prompt engineering with other models, too.
OK, what kind of AI-driven personal assistant do you want? We can distinguish three main concepts: general chatbot, knowledge-based one, and one allowed to execute actions for a user.
Your first chatbot
Let’s start with the implementation of a simple bot – to talk about everything except the newest history.
As I’ve mentioned, it’s often required not to use the OpenAI API, but rather its own cloud-hosted model instance. To deploy one, you need an Azure account. Go to https://portal.azure.com/ , create a new resource, and select “Azure OpenAI”. Then go to your new resource, select “Keys and endpoints” from the left menu, and copy the endpoint URL together with one of the API keys. The endpoint should look like this one: https://azure-openai-resource-name.openai.azure.com/.
Now, you create a model. Go to “Model deployments” and click the “Manage deployments” button. A new page appears where you can create a new instance of the gpt-4 model. Please note that if you want to use the gpt-4-turbo model, you need to select the 1106 model version which is not available in all regions yet. Check this page to verify availability across regions.
Now, you have your own GPT model instance. According to Azure's privacy policy, the model is stateless, and all your data is safe, but please read the “Preventing abuse and harmful content generation” and “How can customers get an exemption from abuse monitoring and human review?” sections of the policy document very carefully before continuing with sensitive data.
Let’s call the model!
curl --location https://azure-openai-resource-name.openai.azure.com/openai/deployments/name-of-your-deployment/chat/completions?api-version=2023-05-15' \
--header 'api-key: your-api-key \
--header 'Content-Type: application/json' \
--data '{
"messages": [
{
"role": "user",
"content": "Hello!"
}
]
}'
The response should be like the following one.
{
"id": "chatcmpl-XXX",
"object": "chat.completion",
"created": 1706991030,
"model": "gpt-4",
"choices": [
{
"finish_reason": "stop",
"index": 0,
"message": {
"role": "assistant",
"content": "Hello! How can I assist you today?"
}
}
],
"usage": {
"prompt_tokens": 9,
"completion_tokens": 9,
"total_tokens": 18
}
}
Generally speaking, we’re done! You are making a conversation with your own chatbot. See the official documentation for a comprehensive API reference. Note that 2023-05-15 is the latest stable version of the API when I’m writing this text – you can use a newer preview version, or maybe there is a newer stable version already available.
However, using cURL is not the best user experience. Most tutorials propose using Python to develop your own LLM-based application. It’s a good advice to follow – Python is simple, offers SDKs for most generative AI models, and Langchain – one library to rule them all. However, our target application will handle more enterprise logic and microservices integration than LLM API integration, so choosing a programming language based only on this criterion may result in a very painful misusage in the end.
At this stage, I’ll show you an example of a simple chatbot application using Azure OpenAI SDK in two languages: Python and Java. Make your decision based on your language knowledge and more complex examples from the following parts of the article.
The Python one goes first.
from openai import AzureOpenAI
client = AzureOpenAI(
api_key='your-api-key',
api_version="2023-05-15",
azure_endpoint= ‘https://azure-openai-resource-name.openai.azure.com/'
)
chat_completion = client.chat.completions.create(
model=" name-of-your-deployment ",
messages=[
{"role": "user", "content": "Hello!"}
]
)
print(chat_completion.choices[0].message.content)
Here is the same in Java:
package demo;
import com.azure.ai.openai.OpenAIClientBuilder;
import com.azure.ai.openai.models.ChatCompletionsOptions;
import com.azure.ai.openai.models.ChatRequestUserMessage;
import com.azure.core.credential.AzureKeyCredential;
import java.util.List;
class Main {
public static void main(String[] args) {
var openAIClient = new OpenAIClientBuilder()
.credential(new AzureKeyCredential("your-api-key"))
.endpoint("https://azure-openai-resource-name.openai.azure.com/ ")
.buildClient();
var chatCompletionsOptions = new ChatCompletionsOptions(List.of(new ChatRequestUserMessage("Hello!")));
System.out.println(openAIClient.getChatCompletions("name-of-your-deployment", chatCompletionsOptions)
.getChoices().getFirst().getMessage().getContent());
}
}
One of the above applications will be a base for all you’ll build with this article.
User interface and session history
We’ve learnt how to send a prompt and read a completion. As you can see, we send a list of messages with a request. Unfortunately, the LLM’s API is stateless, so we need to send an entire conversation history with each request. For example, the second prompt, “How are you?”, in Python looks like that.
messages=[
{"role": "user", "content": "Hello!"},
{"role": "assistant", "content": "How can I help you"},
{"role": "user", "content": "How are you?"}
]
Therefore, we need to maintain the conversation history in our application, which brings us back to the user journey identification, starting with the user interface.
The protocol
The easy way is to create a web application with REST. The conversation history is probably shown on the page all the time, so it’s easy to send the entire history with each request from the frontend to the backend, and then from the backend to the LLM. On the other hand, you still need to add some system prompts to the conversation (we’ll discuss system prompts later) and sending a long conversation over the internet twice is a waste of resources. Moreover, LLMs may be slow, so you can easily hit a timeout for popular REST gateways, and REST offers just a single response for each request.
Because of the above, you may consider using an asynchronous communication channel: WebSocket or Server-Side Events. SSE is a one-way communication channel only, so the frontend still needs to send messages via the REST endpoint and may receive answers asynchronously. This way, you can also send more responses for each user query – for example, you can send “Dear user, we’re working hard to answer your question” before the real response comes from the LLM. If you don’t want to configure two communication channels (REST and SSE), go with WebSocket.
“I wish to know that earlier” advice: Check libraries availability for your target environment. For example, popular Swift libraries for WebSocket don’t support SockJS and require some extra effort to keep the connection alive.
Another use case is based on communicators integration. All companies use some communicators nowadays, and both Slack and Teams SDKs are available in many languages and offer asynchronous messaging. You can react to mentions, read entire channels, or welcome new members. However, some extra functionalities may be kind of limited.
Slack SDK doesn’t support “bot is typing” indicators, and Teams offers reading audio and video streams during meetings only for C# SDK. You should undeniably verify all the features you need availability before starting the integration. You need to consider all permissions you’ll need in your customer infrastructure to set up such a chatbot too.
The state
Regardless of what your frontend and communication channel are, you need to retain the history of the conversation. In a single-server environment, the job is easy – you can create a session-scope storage, perhaps a session-key dictionary, or a session Spring bean that stores the conversation. It’s even easier with both WebSocket and SSE because if the server keeps a session open, the session is sticky, and it should pass through any modern load balancer.
However, both WebSocket and SSE can easily scale up in your infrastructure but may break connections when scaling down – when a node that keeps the channel is terminated, the conversation is gone. Therefore, you may consider persistent storage: a database or a distributed cache.
Speech-to-text and text-to-speech
Another piece of our puzzle is the voice interface. It’s important for applications for drivers but also for mechanics who often can’t operate computers with busy (or dirty) hands.
For mobile devices, the task is easy – both iOS and Android offer built-in speech-to-text recognition and text-to-speech generation as a part of accessibility mechanisms, so you can use them via systems’ APIs. Those methods are fast and work on end devices, however their quality is discussable, especially in non-English environments.
The alternative is to use generative AI models. I haven’t conducted credible, trustworthy research in this area, but I can recommend OpenAI Whisper for speech-to-text and Eleven Labs for text-to-speech. Whisper works great in noisy environments (like a car riding on an old pavement), and it can be self-hosted if needed (but the cloud-hosted variant usually works faster). Eleven Labs allows you to control the emotions and delivery of the speaker. Both work great with many languages.
On the other hand, using server-side voice processing (recognition and generation) extends response time and overall processing cost. If you want to follow this way, consider models that can work on streams – for example, to generate voice at the same time when your backend receives the LLM response token-by-token instead of waiting for the entire message to convert.
Additionally, you can consider using AI talking avatars like Synthesia, but it will significantly increase your cost and response time, so I don’t recommend it for real-time conversation tools.
Follow up
This text covers just a basic tutorial on how to create bots. Now you know how to host a model, how to call it in three ways and what to consider when designing a communication protocol. In following parts of the article series, we’ll add some domain knowledge to the created AI-driven personal assistant and teach it to execute real operations. At the end, we’ll try to summarize the knowledge with a hybrid solution , we’ll look for the technology weaknesses and work on the product optimization.
Vehicle fleet as IoT – virtual networks on edge
In the earlier article , we’ve covered the detailed architecture of a fleet management system based on AWS IoT and on-edge virtual networks. Now, we can dive into implementation. Let’s create a prototype of an edge network with two applications running together on both virtual and physical nodes and with isolated virtual networks. As we don’t have fire trucks on hand, we use three computers (the main truck ARM computer simulated by a Raspberry Pi and two application nodes running on laptops) and a managed switch to connect them together.
Overview of topics and definitions used in the material
In this chapter, we provide concise explanations of key networking concepts and technologies relevant to the architecture discussed earlier. These definitions will help readers better understand the underlying mechanisms that enable efficient and flexible communication between Docker containers, the host system, and external devices. Familiarizing yourself with these concepts will facilitate a deeper understanding of the networking aspects of the presented system and their interrelationships.
- Docker Networking : a system that enables containers to communicate with each other and external networks. It provides various network drivers and options to support different network architectures and requirements, including bridge, host, overlay, and IPvlan/MACvlan drivers. Docker networking creates virtual networks and attaches containers to these networks. Each network has a unique IP address range, and containers within a network can communicate using their assigned IP addresses. Docker uses network drivers to manage container connectivity and network isolation.
- IPvlan : a Docker network driver that enables efficient container-to-container and container-to-external network communication by sharing the parent interface's MAC address with its child interfaces. In the context of the router Docker image in the presented topic, IPvlan provides efficient routing between multiple networks and reduces the management overhead associated with MAC addresses.
- Docker Bridge : a virtual network device that connects multiple Docker container networks, allowing containers to communicate with each other and the host system. By default, Docker creates a bridged network named "docker0" for containers to use. Users can create custom bridge networks to segment and isolate container traffic.
- Linux Bridge : a kernel-based network device that forwards traffic between network segments. It operates at the data link layer, similar to how ethernet frames function within the TCP/IP model. Linux Bridges are essential in creating virtual network interfaces for entities such as virtual machines and containers.
- veth : (Virtual Ethernet) a Linux kernel network device that creates a pair of connected virtual network interfaces. Docker uses veths to connect containers to their respective networks, with one end attached to the container and the other end attached to the network's bridge. In a bridged Docker network, veth pairs are created and named when a container is connected to a Docker bridge network, with one end of the veth pair being assigned a unique identifier within the container's network namespace and the other end being assigned a unique identifier in the host's network namespace. The veth pair allows seamless communication between the container and the bridge network. In simple words – veth is a virtual cable between (virtual or not) interfaces of the same machine.
- Network namespace : Docker provides containers with isolated network stacks, ensuring each container has its own private IPs and ports. VLANs (Virtual Local Area Networks) operate at the data link layer, allowing for the creation of logically segmented networks within a physical network for improved security and manageability. When combined in Docker, containers can be attached directly to specific VLANs, marrying Layer 2 (VLAN) and Layer 3 (namespaces) isolation.
- VLAN (Virtual Local Area Network) : a logical network segment created by grouping physical network devices or interfaces. VLANs allow for traffic isolation and efficient use of network resources by separating broadcast domains.
- iptable : a Linux command-line utility for managing packet filtering and network address translation (NAT) rules in the kernel's network filter framework. It provides various mechanisms to inspect, modify, and take actions on packets traversing the network stack.
- masquerade : a NAT technique used in iptables to mask the source IP address of outgoing packets with the IP address of the network interface through which the packets are being sent. This enables multiple devices or containers behind the masquerading device to share a single public IP address for communication with external networks. In the context of the presented topic, masquerading can be used to allow Docker containers to access the Internet through the router Docker image.
Solution proposal with description and steps to reproduce
Architecture overview

The architecture described consists of a Router Docker container, two applications’ containers (Container1 and Container2), a host machine, and two VLANs connected to a switch with two physical devices. The following is a detailed description of the components and their interactions.
Router Docker container
The container has three interfaces:
- eth0 (10.0.1.3): Connected to the br0net Docker network (10.0.1.0/24).
- eth1 (192.168.50.2): Connected to the home router and the internet, with the gateway set to 192.168.50.1.
- eth2 (10.0.2.3): Connected to the br1net Docker network (10.0.2.0/24).
Docker containers
Container1 (Alpine) is part of the br0net (10.0.1.0/24) network, connected to the bridge br0 (10.0.1.2).
Container2 (Alpine) is part of the br1net (10.0.2.0/24) network, connected to the bridge br1 (10.0.2.2).
Main edge device – Raspberry Pi or a firetruck main computer
The machine hosts the entire setup, including the router Docker image and the Docker containers (Container1 and Container2). It has two bridges created: br0 (10.0.1.2) and br1 (10.0.2.2), which are connected to their respective Docker networks (br0net and br1net)
VLANs and switch
The machine’s bridges are connected to two VLANs: enp2s0.1 (10.0.1.1) and enp2s0.2 (10.0.2.1). The enp2s0 interface is configured as a trunk connection to a switch, allowing it to carry traffic for multiple VLANs simultaneously.
Two devices are connected to the switch, with Device1 having an IP address of 10.0.1.5 and Device2 having an IP address of 10.0.2.5
DHCP Server and Client
Custom DHCP is required because of the IP assignment for Docker containers. Since we would like to maintain consistent addressing between both physical and virtual nodes in each VLAN, we let DHCP handle physical nodes in the usual way and assign addresses to virtual nodes (containers) by querying the DHCP server and assigning addresses manually to bypass the Docker addressing mechanism.
In short - the presented architecture describes a way to solve the non-trivial problem of isolating Docker containers inside the edge device architecture. The main element responsible for implementing the assumptions is the Router Docker container, which is responsible for managing traffic inside the system. The Router isolates network traffic between Container1 and Container2 containers using completely separate and independent network interfaces.
The aforementioned interfaces are spliced to VLANs via bridges, thus realizing the required isolation assumptions. The virtual interfaces on the host side are already responsible for exposing externally only those Docker containers that are within the specific VLANs. The solution to the IP addressing problem for Docker containers is also worth noting. The expected result is to obtain a form of IP addressing that will allow a permanent address assignment for existing containers while retaining the possibility of dynamic addressing for new components.
The architecture can be successfully used to create an end-to-end solution for edge devices while meeting strict security requirements.
Step-by-step setup
Now we start the implementation!
VLANs [execute on host]
Let’s set up VLANs.
enp2s0.1
auto enp2s0.1
iface enp2s0.1 inet static
address 10.0.1.1
network 10.0.1.0
netmask 255.255.255.0
broadcast 10.0.1.255
enp2s0.2
auto enp2s0.2
iface enp2s0.2 inet static
address 10.0.2.1
network 10.0.2.0
netmask 255.255.255.0
broadcast 10.0.2.255
Bridges [execute on host]
We should start by installing bridge-utils, a very useful tool for bridge setup.
sudo apt install bridge-utils
Now, let’s config the bridges.
sudo brctl addbr br0
sudo ip addr add 10.0.1.1/24 dev br0
sudo brctl addif br0 enp2s0
sudo ip link set br0 up
sudo brctl addbr br1
sudo ip addr add 10.0.2.1/24 dev br0
sudo brctl addif br0 enp2s0
sudo ip link set br0 up
Those commands create virtual brX interfaces, set IP addresses, and assign physical interfaces. This way, we bridge physical interfaces with virtual ones that we will create soon – it’s like a real bridge, connected to only one river bank so far.
Docker networks [execute on host]
Network for WLAN interface.
docker network create -d ipvlan --subnet=192.168.50.0/24 --gateway=192.168.50.1 -o ipvlan_mode=l2 -o parent=wlp3s0f0 wlan
Network for bridge interface br0.
docker network create --driver=bridge --subnet=10.0.1.0/24 --gateway=10.0.1.2 --opt "com.docker.network.bridge.name=br0" br0net
Network for bridge interface br1.
docker network create --driver=bridge --subnet=10.0.2.0/24 --gateway=10.0.2.2 --opt "com.docker.network.bridge.name=br1" br1net
Now, we have empty docker networks connected to the physical interface (wlp3s0f0 – to connect containers the Internet) or bridges (br0net and br1net – for VLANs). The next step is to create containers and assign those networks.
Docker containers [execute on host]
Let’s create the router container and connect it to all Docker networks – to enable communication in both VLANs and the WLAN (Internet).
docker create -it --cap-add=NET_ADMIN --cap-add=SYS_ADMIN --cap-add=NET_BROADCAST --network=br0net --sysctl net.ipv4.icmp_echo_ignore_broadcasts=0 --ip=10.0.1.3 --name=router alpine
docker network connect router wlan
docker network connect router br1net
Now, we create applications’ containers and connect them to proper VLANs.
docker create -it --cap-add=NET_ADMIN --cap-add=SYS_ADMIN --cap-add=NET_BROADCAST --network=br0net --sysctl net.ipv4.icmp_echo_ignore_broadcasts=0 --name=container1 alpine
docker create -it --cap-add=NET_ADMIN --cap-add=SYS_ADMIN --cap-add=NET_BROADCAST --network=br1net --sysctl net.ipv4.icmp_echo_ignore_broadcasts=0 --name=container2 alpine
OK, let’s start all containers.
docker start router
docker start container1
docker start container2
Now, we’re going to configure containers. To access Docker images’ shells, use the command
docker exec -it <image_name> sh.
Router container setup [execute on Router container]
Check the interface’s IP addresses. The configuration should be as mentioned below.
eth0 Link encap:Ethernet HWaddr 02:42:0A:00:01:03
inet addr:10.0.1.3 Bcast:10.0.1.255 Mask:255.255.255.0
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:745 errors:0 dropped:0 overruns:0 frame:0
TX packets:285 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:0
RX bytes:142276 (138.9 KiB) TX bytes:21966 (21.4 KiB)
eth1 Link encap:Ethernet HWaddr 54:35:30:BC:6F:59
inet addr:192.168.50.2 Bcast:192.168.50.255 Mask:255.255.255.0
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:4722 errors:0 dropped:0 overruns:0 frame:0
TX packets:1515 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:0
RX bytes:3941156 (3.7 MiB) TX bytes:106741 (104.2 KiB)
eth2 Link encap:Ethernet HWaddr 02:42:0A:00:02:01
inet addr:10.0.2.3 Bcast:10.255.255.255 Mask:255.0.0.0
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:829 errors:0 dropped:0 overruns:0 frame:0
TX packets:196 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:0
RX bytes:190265 (185.8 KiB) TX bytes:23809 (23.2 KiB)
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:60 errors:0 dropped:0 overruns:0 frame:0
TX packets:60 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:5959 (5.8 KiB) TX bytes:5959 (5.8 KiB)
Then let’s set up the iptables. You can omit the first command if the iptables package is already installed. The second command configures the masquerade, and the rest of them configure routing rules.
apk add ip6tables iptables
iptables -t nat -A POSTROUTING -o eth1 -j MASQUERADE
iptables -P INPUT ACCEPT
iptables -P FORWARD DROP
iptables -P OUTPUT ACCEPT
iptables -A FORWARD -i eth1 -o eth0 -j ACCEPT
iptables -A FORWARD -i eth1 -o eth2 -j ACCEPT
iptables -A FORWARD -i eth2 -o eth1 -j ACCEPT
iptables -A FORWARD -i eth0 -o eth1 -j ACCEPT
Now, we hide the internal addresses of outgoing packets (the masquerade), and the networks are isolated. Please note that there is no routing configured on the host machine, and it’s not even a gateway for both containerized and physical network nodes.
In the mentioned config, test containers will communicate with the external environment by physical interfaces on the router container, and in other words – they will be exposed to the Internet by the Docker router container. Router, in addition to enabling communication between VLANs and the Internet, may also allow communication between VLANs or even specific VLAN nodes of different VLANs. Thus, this container has become the main routing and filtering point for network traffic.
Container1 setup [execute on Container1]
route del default
ip route add default via 10.0.1.3
Container2 setup [execute on Container2]
route del default
ip route add default via 10.0.2.3
As you can see, the container configuration is similar; all we need to do is set up the default route via the router container instead of the docker-default one. In the real-world scenario, this step should be done via the DHCP server.
Switch setup [execute on the network switch]
The configuration above requires a manageable switch. We don’t enforce any specific model, but the switch must support VLAN tagging on ports with the trunk option for a port that combines traffic for multiple VLANs. The configuration, of course, depends on the device. Pay attention to the trunk port of the device, which is responsible for traffic from the switch to our host. In our case, the device1 is connected to a switch port tagged as VLAN1, and the device2 is connected to a switch port tagged as VLAN2. The enp2s0 port of the host computer is connected to a switch port configured as a trunk - to combine traffic of multiple VLANs in a single communication link.
Summary
We’ve managed together to conduct the network described in the first article. You can play with the network with ICMP to verify which nodes can access each other and, more importantly, which nodes can’t be reached outside their virtual networks.
Here is a scenario for the ping test. The following results prove that the created architecture fulfills its purpose and achieves the required insulation.
Source Target Ping status Explanation Container1 Device1 OK VLAN 1 Device1 Container1 OK VLAN 1 Container1 Router (10.0.1.3) OK VLAN 1 Device1 Router (10.0.1.3) OK VLAN 1 Container1 Internet (8.8.8.8) OK VLAN 1 to Internet via Router Device1 Internet (8.8.8.8) OK VLAN 1 to Internet via Router Router Container1 OK VLAN 1 Router Device1 OK VLAN 1 Container1 Container2 No connection VLAN 1 to VLAN 2 Container1 Device2 No connection VLAN 1 to VLAN 2 Container1 Router (10.0.2.3) No connection VLAN 1 to VLAN 2 Device1 Container2 No connection VLAN 1 to VLAN 2 Device1 Device2 No connection VLAN 1 to VLAN 2 Device1 Router (10.0.2.3) No connection VLAN 1 to VLAN 2 Container2 Device2 OK VLAN 2 Device2 Container2 OK VLAN 2 Container2 Router (10.0.2.3) OK VLAN 2 Device2 Router (10.0.2.3) OK VLAN 2 Container2 Internet (8.8.8.8) OK VLAN 2 to Internet via Router Device2 Internet (8.8.8.8) OK VLAN 2 to Internet via Router Router Container2 OK VLAN 2 Router Device2 OK VLAN 2 Container2 Container1 No connection VLAN 2 to VLAN 1 Container2 Device1 No connection VLAN 2 to VLAN 1 Container2 Router (10.0.1.3) No connection VLAN 2 to VLAN 1 Device2 Container1 No connection VLAN 2 to VLAN 1 Device2 Device1 No connection VLAN 2 to VLAN 1 Device2 Router (10.0.1.3) No connection VLAN 2 to VLAN 1
As you can see from the table above, the Router container is able to send traffic to both networks so it’s a perfect candidate to serve common messages, like GPS broadcast.
If you need more granular routing or firewall rules, we propose to use firewalld instead of iptables . This way, you can disable non-encrypted traffic or open specific ports only.
Nevertheless, the job is not over yet. In the next article , we’ll cover IP addresses assignment problem, and run some more sophisticated tests over the infrastructure.
How to build software architecture for new mobility services - connected vehicle remote control
Remote control over a vehicle is not a new idea; it has become a trend in the modern world. The idea of vehicle remote control is highly connected with vehicle telematics , which is used to gather data using GPS technology, sensors, and onboard diagnostics codes. Managed data can include vehicle location, driver behavior, vehicle activity, and real-time engine diagnostics. Further, the technology is managed on software platforms that help fleet owners manage their assets remotely.
The data collected often includes vehicle location, fuel consumption, speeding, and maintenance information. But what if a car got stolen? It would be helpful not only to have the current location but also to send a command to a vehicle to turn the engine off or enable signalization. A huge problem in this case is to have a platform that will be independent of the Original Equipment Manufacturer (OEM). The best option here is to move the solution to the Cloud and introduce a single point of work with vehicles and integration with different OEMs.
Such telematics remote control gives a powerful opportunity to car-rental or car-sharing services like CityBee or SnapCar. They now can track their cars and also offer customers a no-human way to reserve a car using just a mobile application and know the current vehicle state when it is in use.
Vehicle connection
To establish connection to a car it’s necessary to equip the vehicle with an Internet-connected telemetry device. Some companies provide such a device as part of machine installation, but third-party tools like Geotab can be used for custom installation as well. It is important to have a device intended for two-way connection with a vehicle, as some solutions were created only for tracking purposes. Remote vehicle controllers like Mobokey offer the following commands on a vehicle:
- Lock/Unlock
- Turn engines on/off
- Klaxon sound
- Turn flash-lights on/off
- Wake up/sleep
- Connect/Disconnect the vehicle
Some manufacturers require their cars to be woken up explicitly before executing actual commands. It is intended to prevent the continuous connection or in case of low battery level.
Software solution
Once the two-way connection with a vehicle is established, we need a solution to track the actual status of a car and send commands. To do that, it is required:
- To make sure integration with a vehicle is completed successfully
- That the connection is secure
- That the command can be sent by us – it may differ depending on the manufacturer and model
and that we prepared:
- Dashboard to send commands
- Response handling - to be aware if command execution was successful
The damage caused by a successful attack on a vehicular telematics system because of an unsecured connection may range from mild to disastrous - to the extent of serious casualties and property losses. To enforce the security objectives for deployed and developing vehicular monitoring systems, embodiments of the disclosed technology include a stack of security approaches, both on physical and software levels.
As vehicle commands are sent over the Internet, it is important to have a network and infrastructure security built. The software solution stack must be enclosed in a Virtual Private Cloud (VPC). Apart from that, it is highly recommended to apply some best practices such as Static Application Security Testing (SAST), Interactive Application Security Testing (IAST), and Software Composition Analysis (SCA) to find vulnerabilities.
Another challenge in software solutions relates to the need for integration with different OEMs . Each OEM provides an API to integrate with and different ways of communication with vehicles - it may be a synchronous way, for example, HTTP request to REST API, or an asynchronous way, for instance, using queue-based protocols like MQTT.
Another issue is handling command execution responses or callbacks . The easiest way to implement this is when the OEM API synchronously responds with a command execution result, but in most cases, the OEM system may notify us about the execution result eventually in some time.
In this case, it is necessary to find a way to map a command request to a vehicle via OEM API and an execution response as it is used for retry policy, error handling, and troubleshooting.
Software architecture
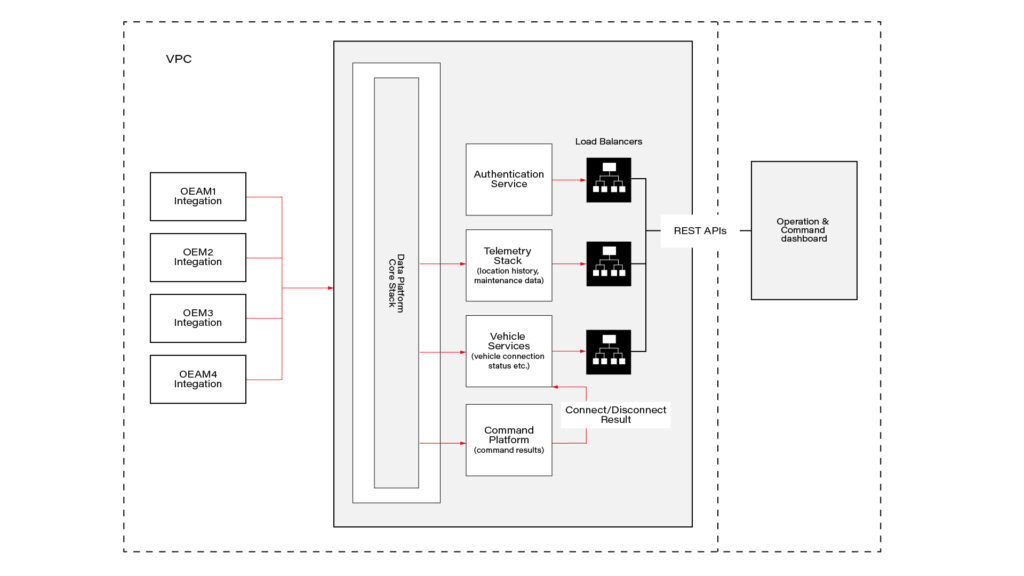
This connected vehicle solution uses the IoT platform, which authenticates messages from connected vehicles and processes data according to business rules. It leverages a set of main services, including Vehicle Services to connect vehicles and store vehicle-related data, a Telemetry stack to collect a delivery stream of input events and write them into Database, Command Services to send commands to the car and combine execution responses; and a queue-based topic which is intended for inter-communication between different parts of the system.
The solution also includes integration with OEM APIs. When IoT receives a message, it authenticates and authorizes the message, and the Command Platform executes the appropriate rule on the message, which routes the message to the appropriate OEM integration.
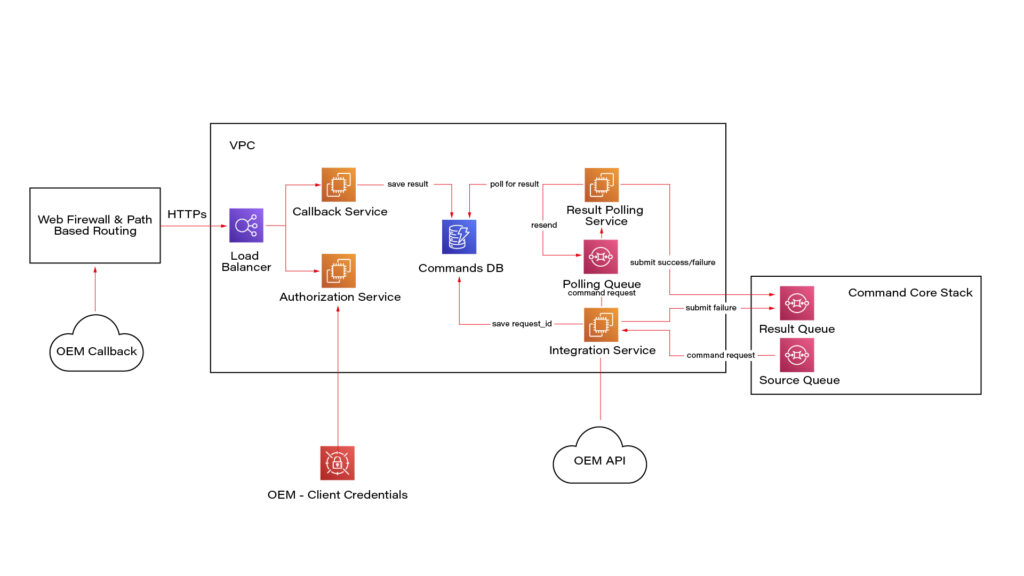
Here we see a potential OEM integration with the IoT Platform. It has authorization integration to allow us to send request OEM API securely; Callback integration to keep OEM response data regarding command execution; Database to keep mapping and consistent result - command request vs response; retry mechanism implementation using polling results from the database.
Once the system is authenticated, requests can be submitted to the connected vehicle solution’s OEM APIs. Based on the request identification data, the system eventually waits for the command result using a callback mechanism.
Conclusion
As highly-equipped connected vehicles increasingly rely on data exchanged with the infrastructure, it is required to have sustainable infrastructure, well-built cyber-security, privacy, and safety taken into account. The proposed solution also pays respect to the need to enroll in this process vehicle from different manufacturers.
This solution with remote vehicle control may be extremely useful for car-sharing systems, and apart from that, it can cover a solution for such use cases as autonomous and semi-autonomous vehicle driving, usage-based insurance, and customized in-vehicle experience . The solution also includes two-way communication.

How to manage fire trucks – IoT architecture with isolated applications and centralized management system
Welcome to a short cycle of articles that shows a way to combine network techniques and AWS services for a mission-critical automotive system .
We’ll show you how to design and implement an IoT system with a complex edge architecture.
The cycle consists of three articles and shows the architecture design, a step-by-step implementation guide, and some pitfalls with the way to overcome these.
Let’s start!
AWS IoT usage to manage vehicle fleet
Let’s create an application. But this won’t be a typical, yet another CRUD-based e-commerce system. This time, we’d like to build an IoT-based fleet-wise system with distributed (on-edge/in-cloud) computing.
Our customer is an automotive company that produces fire trucks. We’re not interested in engine power, mechanical systems, and firefighters' equipment. We’re hired to manage the fleet of vehicles for both the producer and its customers.
Each truck is controlled by a central, “rule-them-all” computer connected to all vehicles CAN buses, and whole extra firefighters’ equipment. The computer sends basic vehicle data (fuel level, tire pressure, etc.) to the fire station and a central emergency service supervisor. It receives new orders, calculates the best route to targets and controls all the vehicle equipment - pumps, lights, signals, and of course – the ladder. Also, it sends some telemetry and usage statistics to the producer to help design even better trucks in the future.
However, those trucks are not the same. For instance, in certain regions, the cabin must be airtight, so extra sensors are used. Some cities integrate emergency vehicles with city traffic light systems to clear the route for a running truck. Some stations require specialized equipment like winches, extra lights, power generators, crew management systems, etc.
Moreover, we need to consider that those trucks often operate in unpleasant conditions, with a limited and unreliable Internet connection available.
Of course, the customer would like to have a cloud-based server to manage everything both for the producer and end users - to collect logs and metrics with low latency, to send commands with no delay, and with a colorful, web-based, easy-to-use GUI.
Does it sound challenging? Let's break it down!
Requirements
Based on a half-an-hour session with the customer, we've collected the following, a bit chaotic, set of business requirements:
- a star-like topology system, with a cloud in the center and trucks around it,
- groups of trucks are owned by customers - legal entities that should have access only to their trucks,
- each group that belongs to a customer may be customized by adding extra components, both hardware-, or software-based,
- each truck is controlled by identical, custom, Linux-based computers running multiple applications provided by the customer or third parties,
- truck-controlling computers are small, ARM-based machines with limited hardware and direct Internet access via GSM,
- Internet connection is usually limited, expensive, and non-reliable,
- the main computer should host common services, like GPS or time service,
- some applications are built of multiple components (software and hardware-based) - hardware components communicate with the main computers via the in-vehicle IP network,
- the applications must communicate with their servers over the Internet, and we need to control (filter/whitelist) this traffic,
- each main computer is a router for the vehicle network,
- each application should be isolated to minimize a potential attack scope,
- components in trucks may be updated by adding new software or hardware components, even after leaving the production line,
- the cloud application should be easy - read-only dashboards, truck data dump, send order, both-way emergency messages broadcast,
- new trucks can be added to the system every day,
- class-leading security is required - user and privileges management, encrypted and signed communication, operations tracking, etc.
- provisioning new vehicles to the system should be as simple as possible to enable the factory workers to do it.
As we’ve learned so far, the basic architecture is as shown in the diagram below.
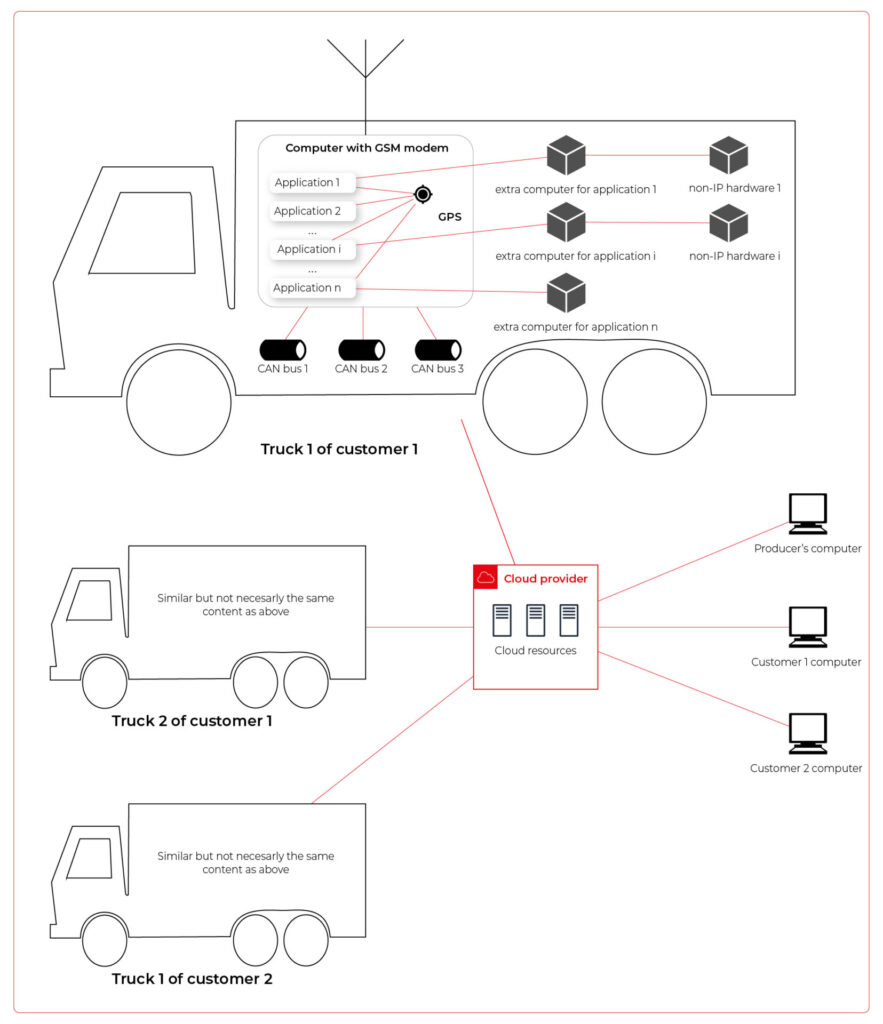
Our job is to propose a detailed architecture and prove the concept. Then, we’ll need a GPT-based instrument bench of developers to hammer it down.
The proposed architecture
There are two obvious parts of the architecture - the cloud one and the truck one. The cloud one is easy and mostly out-of-scope for the article. We need some frontend, some backend, and some database (well, as usual). In the trucks, we need to separate applications working on the same machine and then isolate traffic for each application. It sounds like containers and virtual networks. Before diving into each part, we need to solve the main issue - how to communicate between trucks and the cloud.
Selecting the technology
The star-like architecture of the system seems to be a very typical one - there is a server in the center with multiple clients using its services. However, in this situation, we can't distinguish between resources/services supplier (the server) and resources/services consumers (the clients). Instead, we need to consider the system as a complex, distributed structure with multiple working nodes, central management, and 3rd party integration. Due to the isolation, trucks’ main computers should containerize running applications. We could use Kubernetes clusters in trucks and another one in the cloud, but in that case, we need to implement everything manually – new truck onboarding, management at scale, resource limiting for applications, secured communication channels, and OTA updates. In the cloud, we would need to manage the cluster and pods, running even when there is no traffic.
An alternative way is the IoT. Well, as revealed in the title, this is the way that we have chosen. IoT provides a lot of services out-of-the-box - the communication channel, permissions management, OTA updates, components management, logs, metrics, and much more. Therefore, the main argument for using it was speeding up the deployment process.
However, we need to keep in mind that IoT architecture is not designed to be used with complex edge devices. This is our challenge, but fortunately, we are happy to solve it.
Selecting the cloud provider
The customer would like to use a leading provider, which reduces the choice to the top three in the World: AWS, MS Azure, and GCP.
The GCP IoT Core is the least advanced solution. It misses a lot of concepts and services available in the competitors, like a digital twin creation mechanism, complex permissions management, security evaluation, or a complex provisioning mechanism.
The Azure IoT is much more complex and powerful. On the other hand, it suffers from shortcomings in documentation, and - what is most important - some features are restricted to Microsoft instruments only (C#, Visual Studio, or PowerShell). On the other hand, it provides seamless AI tool integration, but it’s not our case for now.
But the last one – AWS IoT – fits all requirements and provides all the services needed. Two MQTT brokers are available, plenty of useful components (logs forwarding, direct tunnel for SSH access, complex permission management), and almost no limitation for IoT Core client devices. There is much more from AWS Greengrass - an extended version with higher requirements (vanilla C is not enough), but we can easily fulfill those requirements with our ARM-based trucks’ computers.
The basic architecture
Going back to the start-like topology, the most important part is the communication between multiple edge devices and the core. AWS IoT provides MQTT to enable a TCP-based, failure-resistant communication channel with a buffer that seamlessly keeps the communication on connection lost. The concept offers two MQTT brokers (in the cloud and on the edge) connected via a secured bridge. This way, we can use the MQTT as the main communication mechanism on the edge and decide which topics should be bridged and transferred to the cloud. We can also manage permissions for each topic on both sides as needed.
The cloud part is easy – we can synchronize the IoT MQTT broker with another messaging system (SNS/SQS, Kafka, whatever you like) or read/write it directly from our applications.
The edge part is much more complex. In the beginning, let’s assume that there are two applications running as executable programs on the edge. Each of these uses its own certificate to connect to the edge broker so we can distinguish between them and manage their permissions. It brings up some basic questions – how to provide certificates and ensure that one application won’t steal credentials from another. Fortunately, AWS IoT Greengrass supplies a way to run components as docker containers – it creates and provides certificates and uses IPC (inter-process communication) to allow containers to use the broker. Docker ensures isolation with low overhead, so each application is not aware of the other one. See the official documentation for details: Run a Docker container - AWS IoT Greengrass (amazon.com) .
Please note the only requirement for the applications, which is, in fact, the requirement we make to applications’ providers: we need docker images with applications that use AWS IoT SDK for communication.
See the initial architecture in the picture below.
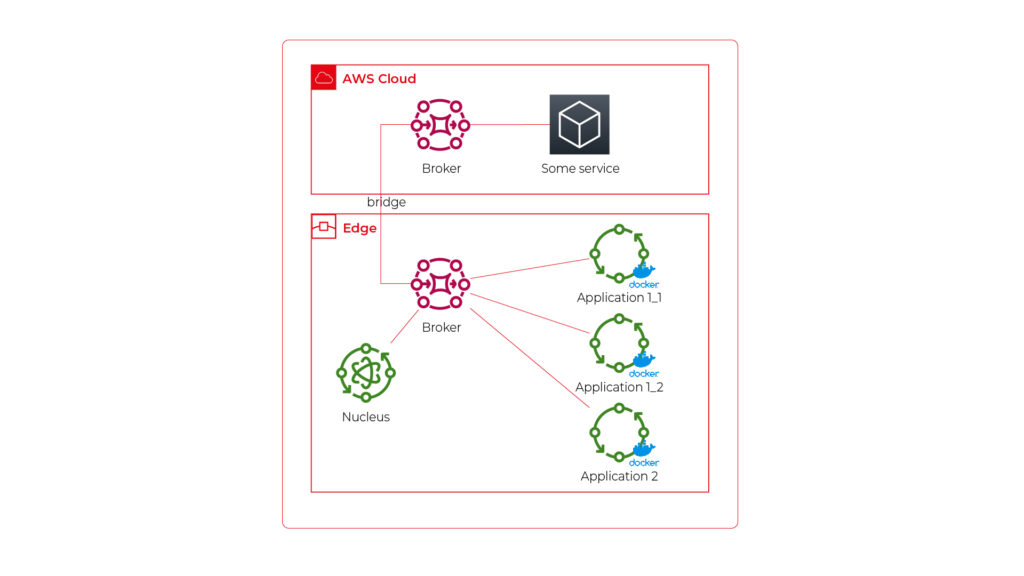
As you can see, Application 1 contains two programs (separate docker containers) communicating with each other via the broker: Application 1_1 and Application 1_2. Thanks to the privileges management, we are sure that Application 2 can’t impact or read this communication. If required, we can also configure a common topic accessible by both applications.
Please also note that there is one more component – Nucleus. You can consider it as an orchestrator required by AWS IoT to rule the system.
Of course, we can connect thousands of similar edges to the same cloud, but we are not going to show it on pictures for readability reasons. AWS IoT provides deployment groups with versioning for OTA updates based on typical AWS SDK. Therefore, we can expose a user-friendly management system (for our client and end users) to manage applications running on edge at scale.
Virtual networks
Now, let’s challenge the architecture with a more complex scenario. Let’s assume that Application 2 communicates with an in-cabin air quality sensor – a separate computer that is in the same IP network. We can assume the sensor is a part of Application 2, and our aim is to enable such communication but also to hide it from Application 1. Let’s add some VLANs and utilize network interfaces.
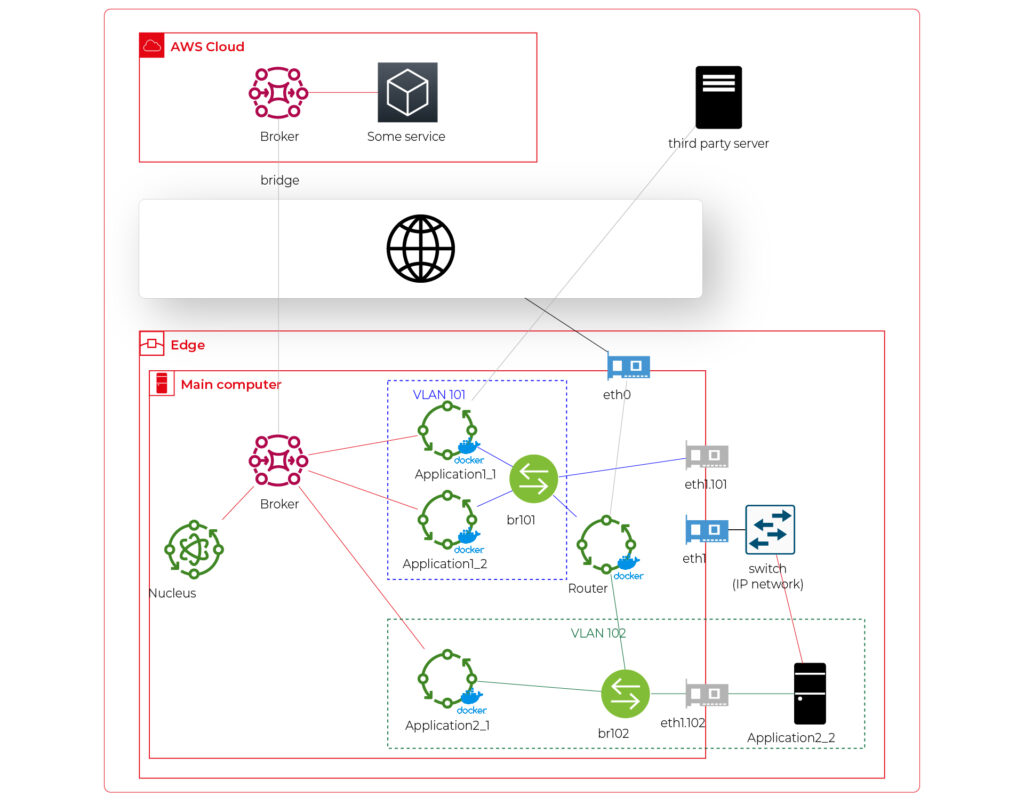
Starting from the physical infrastructure, the main computer uses two interfaces – eth0 to connect to the Internet and eth1 connected to a physical, managed switch (the “in-vehicle IP network” mentioned above). The Application 2_2 computer (the air quality sensor) is connected to the switch to a port tagged as VLAN 102, and the switch is connected to eth1 via a trunk port.
The eth0 interface is used by the main computer (host) to communicate with the Internet, so the main MQTT bridging is realized via this interface. On the other hand, there is also a new Greengrass-docker component called router. It’s connected to eth0 and to two virtual bridges – br101 and br102. Those bridges are not the same as the MQTT bridge. This time, we need to use the kernel-based Linux feature “bridge,” which is a logical, virtual network hub. Those bridges are connected to virtual network interfaces eth1.101 and eth1.102 and to applications’ containers.
This way, Application 1 uses its own VLAN 101 (100% virtual), and Application 2 uses its own VLAN 102 (holding both virtual and physical nodes). The application separation is still ensured, and there is no logical difference between virtual and mixed VLANs. Applications running inside VLANs can’t distinguish between physical and virtual nodes, and all IP network features (like UDP broadcasting and multicasting) are allowed. Note that nodes belonging to the same application can communicate omitting the MQTT (which is fine because the MQTT may be a bottleneck for the system).
Moreover, there is a single security-configuration point for all applications. The router container is the main gateway for all virtual and physical application-nodes, so we can configure a firewall on it or enable restricted routes between specific nodes between applications if needed. This way, we can enable applications to communicate with third-party servers over the Internet (see Application 1_1 in the picture), to communicate with individual nodes of the applications without restrictions, and to control the entire application-related traffic in a single place. And this place – the router – is just another Greengrass component, ready to be redeployed as a part of the OTA update. Also, the router is a good candidate to serve traffic targeting all networks (and all applications), e.g., to broadcast GPS position via UDP or to act as the network time server.
One more broker
What if… the application is provided as a physical machine only?
Well, as the main communication channel is MQTT, and the direct edge-to-Internet connection is available but limited, we would like to enable a physical application to use the MQTT. MQTT is a general standard for many integrated systems (small computers with limited purposes), but our edge MQTT broker is AWS-protected, so there are two options available. We can force the application supplier to be AWS-Greengrass compatible, or we need another broker. As we’re pacifists and we can’t stand forcing anybody to do anything, let’s add one more broker and one more bridge.
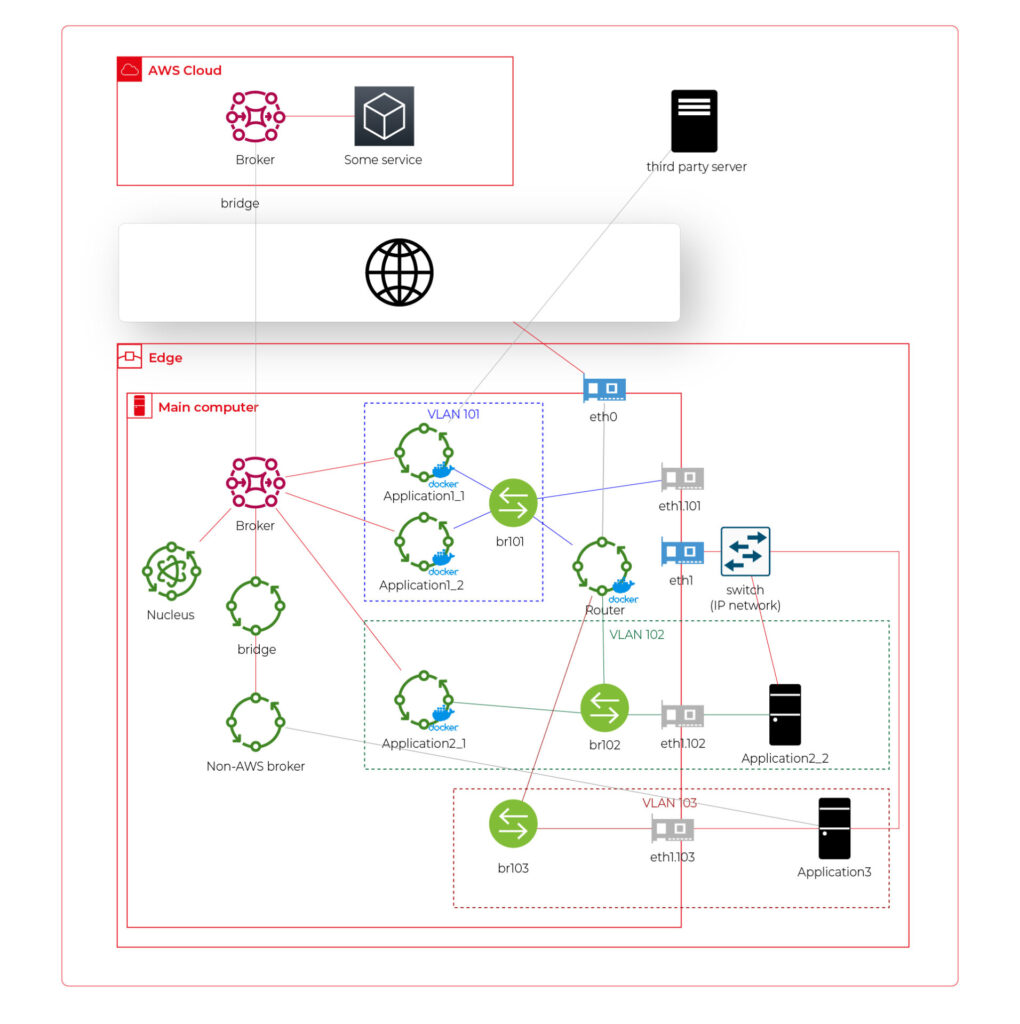
This time, there are two new components. The first one, an MQTT broker (Mosquitto or similar), interacts with Application 3. As we can’t configure the Mosquitto to act as a bridge for the AWS-managed broker, there is one more, custom application running on the server for this purpose only – a Greengrass component called “bridge”. This application connects to both local MQTT brokers and routes specific messages between them, as configured. Please note that Application 3 is connected to its own VLAN even if there are no virtual nodes. The reason is – there are no virtual nodes yet, but we’d like to keep the system future-proof and consistent. This way, we keep the virtual router as a network gateway for Application 3, too. Nevertheless, the non-AWS broker can listen to specific virtual interfaces, including eth1.103 in this case, so we can enable it for specific VLANs (application) if needed.
Summary
The article shows how to combine AWS IoT, docker, and virtual networks to achieve a future-proof fleet management system with hardware- and software-based applications at scale. We can use AWS tools to deliver new applications to edge devices and manage groups evoking truck owners or truck models. Each vehicle can be equipped with an ARM computer that uses AWS-native fleet provisioning on OS initialization to join the system. The proposed structure may seem to be complex, but you need to configure it only once to fulfill all requirements specified by the client.
However, theory is sometimes easier than practice, so we encourage you to read the following article with implementation details .
Generative AI in automotive: How industry leaders drive transformation
Generative AI is quickly emerging as one of the key drivers of automotive innovation. This shift is not just a future possibility; it's already happening. In 2023, the generative AI market in the automotive sector was valued at approximately USD 387.54 million . Looking ahead, it's projected to surge to about USD 2,691.92 million by 2032 , demonstrating a robust Compound Annual Growth Rate (CAGR) of 24.03% from 2023 to 2032. Major Original Equipment Manufacturers (OEMs) are integrating sophisticated AI algorithms into various aspects of the industry, from vehicle design to enhancing customer interactions.
The impact of generative AI in the automotive sector is already evident. For instance, NVIDIA's generative AI models empower designers to swiftly transform 2D sketches into intricate 3D models, significantly speeding up the design process and opening up new avenues for creativity and efficiency. Meanwhile, automotive manufacturing companies are exploring collaborations with tech giants to integrate advanced AI language models into their vehicles, enhancing the driving experience.
This article will explore how leading automotive players are leveraging generative AI to not only keep pace with the evolving demands of the market but also redefine mobility and automotive excellence.
Software-defined vehicles and generative AI
The introduction of software-defined vehicles (SDVs) represents a significant shift in the automotive industry, moving beyond traditional performance metrics such as horsepower and chassis design to focus on software and digital capabilities. By 2025, it is estimated that vehicles could require as much as 650 million lines of code each. These vehicles heavily rely on software for critical operations such as driving assistance, navigation, and in-car entertainment systems.
The integration of generative AI in this domain further amplifies these capabilities. Generative AI is known for its ability to create and optimize designs and solutions, which is beneficial in improving both the software and hardware aspects of SDVs. It helps in generating efficient algorithms for vehicle control systems, contributes to the development of more effective and adaptive software solutions, and even assists in designing vehicle components for better performance and efficiency.
However, bringing generative AI into this landscape presents both unique opportunities and significant challenges.
The opportunities and challenges
- Challenges
Integrating advanced AI systems into modern vehicles is a complex and multifaceted task that demands technical expertise and careful attention to data security and privacy , particularly with the increasing reliance on data-driven functionalities in vehicles.
The automotive industry is facing a complex regulatory environment. With the growing importance of AI and data in-vehicle systems, it has become crucial to comply with various international regulations and standards , covering areas such as data protection, safety, and environmental impact.
One significant challenge for OEMs is the lack of standardization within the software-defined vehicles industry, which can complicate the development and integration of new technologies as there are no universal norms or protocols to guide these processes.
Internal transformation is also a critical aspect of this integration. OEMs may need to revamp their internal capabilities, processes, and technological infrastructure to use generative AI effectively.
- Opportunities
Integrating generative AI technology allows for more creative and efficient vehicle design , resulting in quicker prototypes and more innovative models .
It also allows for creating personalized vehicles that cater to individual user preferences like never before. In manufacturing, generative AI promotes more efficient and streamlined production processes , which optimizes resources and reduces waste.
Let's explore how automotive manufacturers already use gen AI to boost their operations.
Generative AI applications in the automotive industry
Generative AI's integration into the automotive industry revolutionizes multiple facets of vehicle design, manufacturing, and user experience. Let's explore these areas:
Design and conceptualization
- Vehicle Design Enhancement : Artificial Intelligence is revolutionizing the vehicle design process by speeding up the initial phase of the design cycle. Generative design algorithms use parameters such as material properties, cost constraints, and performance requirements to generate optimal design solutions. For example, in vehicle body design, AI can propose multiple design options that optimize for aerodynamics and strength while minimizing weight. This enables quick visualization and modification of ideas.
Toyota Research Institute has introduced a generative AI technique to optimize the vehicle design process to produce more efficient and innovative vehicles. This approach allows designers to explore a wider range of design possibilities, including aerodynamic shapes and new material compositions.
- Digital Prototyping : The use of Generative AI technology makes it possible to create digital prototypes, which can be tested and refined extensively without the need for physical models. This approach is highly beneficial, as it enables designers to detect and correct potential design flaws early in the process.
BMW's use of NVIDIA Omniverse is a significant step in design improvement. The company uses this platform to create digital twins of their manufacturing facilities, integrating generative AI to enhance production efficiency and design processes.
Manufacturing and production
- Streamlining Manufacturing Processes : Generative AI significantly enhances the efficiency of manufacturing processes. Unlike traditional AI or machine learning models, generative AI goes beyond identifying inefficiencies; it actively generates novel manufacturing strategies and solutions. By inputting parameters such as production timelines, material constraints, and cost factors, generative AI algorithms can propose a range of optimized manufacturing workflows and processes.
BMW has implemented generative AI in a unique way to improve the scheduling of their manufacturing plant. In partnership with Zapata AI, BMW utilized a quantum-inspired generative model to optimize their plant scheduling, resulting in more efficient production. This process, known as Generator-Enhanced Optimization (GEO), has significantly improved BMW's production planning, demonstrating the potential of generative AI in industrial applications.
- Supply Chain Resilience : In the context of supply chain management, particularly during challenges like the automotive microchip shortage, generative AI plays a crucial role. Unlike conventional AI, gen AI can do more than just analyze existing supply chain networks; it can creatively generate alternative supply chain models and strategies. The algorithms can propose diverse and robust supplier networks by leveraging data about supplier capabilities, logistics constraints, and market demands.
- Customized Production : With generative AI, it is now possible to create personalized vehicles on a large scale, meeting the growing demand for customization in the automotive industry.
Predictive maintenance and modelling
Traditionally, predictive maintenance relies on historical data to forecast equipment failures, but generative AI enhances this process by creating detailed, simulated data environments. This technology generates realistic yet hypothetical scenarios, encompassing a vast array of potential machine failures or system inefficiencies that might not be present in existing data sets.
The generative aspect of this AI technology is particularly valuable in situations where real-world failure data is limited or non-existent. By synthesizing new data points, generative AI models can extrapolate from known conditions to predict how machinery will behave under various untested scenarios.
In modeling, generative AI goes a step further. It not only predicts when and how equipment might fail but also suggests optimal maintenance schedules, anticipates the impact of different environmental conditions, and proposes design improvements.
Customer experience and marketing
One of the challenges in using generative AI, particularly in customer interaction, is the accuracy of AI-generated responses. An example of this was an error by ChatGPT, where it was tricked into suggestion of buying a Chevy for a dollar . This incident underlines the potential risks of misinformation in AI-driven communication, emphasizing the need for regular updates, accuracy checks, and human oversight in AI systems. Nevertheless, this technology offers many opportunities for improving the customer experience:
- Personalized User Experiences and Enhanced Interaction : AI's capability to adapt to individual preferences not only enhances the driving experience but also improves the functionality of vehicle features.
For instance, in collaboration with Microsoft, General Motors is exploring the use of AI-powered virtual assistants that offer drivers a more interactive and informative experience. These assistants can potentially provide detailed insights into vehicle features and performance metrics and offer personalized recommendations based on driving patterns.
Also, Mercedes-Benz is exploring the integration of generative AI through voice-activated functionalities in collaboration with Microsoft. This includes leveraging the OpenAI Service plugin ecosystem, which could allow for a range of in-car services like restaurant reservations and movie ticket bookings through natural speech commands.
Example applications
- Simplified Manuals : AI technology, enabled by natural language processing, has simplified the interaction between drivers and their vehicles. Beyond just responding to voice commands with pre-existing information, a generative AI system can even create personalized guides or tutorials based on the driver's specific queries and past interactions.
Grape Up has developed an innovative voice-driven car manual that allows drivers to interact with their vehicle manual through voice commands, making it more accessible and user-friendly. With this technology, drivers no longer have to navigate through a traditional manual. Still, they can easily ask questions and receive instant verbal responses, streamlining the process of finding information about their vehicle.
- Roadside Assistance: In this scenario, generative AI can go beyond analyzing situations and suggesting solutions by creating new, context-specific guidance for unique problems. For instance, if a driver is stranded in a rare or complex situation, the AI could generate a step-by-step solution, drawing from a vast database of mechanical knowledge, previous incidents, and environmental factors.
- Map Generation : Here, generative AI can be used to not only update maps with real-time data but also to predict and visualize future road conditions or propose optimal routes that don't yet exist. For example, it could generate a route that balances time, fuel efficiency, and scenic value based on the driver's preferences and driving history.
- Marketing and Sales Innovation : Generative AI-enabled content engine is transforming the creation of digital advertising for the automotive industry. This content is tailored to meet the unique requirements of automotive brands and their consumers, thereby revolutionizing traditional marketing strategies.
Safety and compliance
- Enhancing Vehicle Safety : Generative AI in vehicles goes beyond traditional AI systems by not only assisting drivers but also by creating predictive models that enhance safety features. It processes and interprets data from cameras and sensors to foresee potential road hazards, often employing advanced generative models that simulate and predict various driving scenarios.
- Regulatory Compliance : Similarly, gen AI helps automakers comply with safety standards and navigate complex regulation changes by monitoring performance data and comparing it against regulatory benchmarks. This allows automakers to stay ahead of the compliance curve and avoid potential legal and financial repercussions.
Autonomous vehicle development
- Simulation and Testing : Generative AI is crucial for developing autonomous vehicle systems. It generates realistic simulations, including edge-case scenarios, to test and improve vehicle safety and performance.
- Enhancing ADAS Capabilities : AI technology can improve essential Advanced Driver Assistance Systems (ADAS) features such as adaptive cruise control, lane departure warnings, and automatic emergency braking by analyzing data from various sensors and cameras. Generative AI's strength in this context lies in its ability to not only process existing data but also to generate new data models, which can predict and simulate different driving scenarios. This leads to more advanced, reliable, and safer ADAS functionalities, significantly contributing to the evolution of autonomous and semi-autonomous driving technologies.
Conclusion
As the automotive industry accelerates towards a more AI-integrated future, the role of expert partners like Grape Up becomes increasingly crucial. Our expertise in navigating the intricacies of AI implementation can help automotive companies unlock the full potential of this technology. If you want to stay ahead in this dynamic landscape, now is the time to embrace the power of generative AI. For more information or to collaborate with Grape Up, contact our experts today.