Build and Run Android Automotive OS on Raspberry Pi 4B


Have you ever wanted to build your own Android? It’s easy according to the official manual, but it’s getting harder on a Windows (or Mac) machine, or if you’d like to run it on physical hardware. Still too easy? Let’s build Android Automotive OS – the same source code, but another layer of complexity. In this manual, we’ll cover all steps needed to build and run Android Automotive OS 11 AOSP on Raspberry Pi 4B using Windows. The solution is not perfect, however. The most principal issue is a lack of Google Services because the entire AAOS is on an open-source project and Google doesn’t provide its services this way. Nevertheless, let’s build the open-source version first, and then we can try to face incoming issues.
TL;DR: If you don’t want to configure and build the system step-by-step, follow the simplified instruction at https://github.com/grapeup/aaos_11_local_manifest
Prerequisites
Hardware
If you want to run the system on a physical device, you need one. I use the Raspberry Pi 4 model B with 8GB of RAM (https://www.raspberrypi.com/products/raspberry-pi-4-model-b/). By the way, if you want to build and run an emulator from the source, it’s also possible, but there is a small limitation – packaging the emulator to a zip file, moving it to another computer, or even running it under Android Studio was introduced in Android 12.
To power your Raspberry, you need a power adapter (USB C, min. 5V 3A). I use the Raspberry-official 5.1V 3A model. You can also power the Raspberry computer from your desktop/laptop’s USB port, especially if you’re going to debug it via a serial connection. Check the “If it doesn’t work” section below for the required hardware.
Another piece of hardware needed is an SD card. In theory, 4GB is all you need, however, I recommend buying a larger card to have some extra space for your applications on Android. I use 32GB and 64GB cards. You’ll also need a built-in or external card reader. I use the latter.
The next step is a screen. It’s optional but fancy. You can connect your mouse and optionally keyboard to your Raspberry Pi via USB and connect any display you have via micro-HDMI but using a touch screen is much more intuitive. I use a Waveshare 10-inch screen dedicated to Raspberry (https://www.waveshare.com/wiki/10.1inch_HDMI_LCD_(B)_(with_case). The screen box has a place to screw the Raspberry too, so you don’t need any extra case. You can also buy it with a power adapter and a display cable.
If you don’t buy a bundle, make sure you have all necessary accessories: micro-HDMI – HDMI cable to connect a screen (Waveshare or any other), USB A – USB mini A cable to connect a touch sensor of the screen, USB mini A 5V 3A adapter to power the screen.

Of course, you need a computer. In this manual, we use a Windows machine with at least 512GB of storage (the Android source is huge) and 16GB of RAM.
Software
You can probably build everything in pure Windows, but the recommended method is to use WSL. I assume you already have it installed, so just make sure you have the newest WSL2 version. If you have never used WSL before, see the full manual here https://learn.microsoft.com/en-us/windows/wsl/install.
WSL adjustments
The standard WSL installation uses a too-small virtual drive and limited RAM, so you need to adjust it.
Let’s start with the disk. Make sure the WSL is shut down by running ‘wsl –shutdown’ in the command prompt. Open Windows Command Prompt with admin privileges and enter ‘diskpart’. Then run ‘select vdisk file=”<path to WSL drive file>”’. For me, the path is “C:\Users\<user>\AppData\Local\Packages\CanonicalGroupLimited.Ubuntu_<WSL_instance_id>\LocalState\ext4.vhdx”. Now you can expand it with the command ‘expand vdisk maximum=512000’. Around 300GB is enough for Android 11, but if you want to play with multiple branches of Android at the same time, you need more space. Now you can close the diskpart with the ‘exit’ command. Next, open the WSL and run ‘sudo resize2fs /dev/sdb 512000M’. I assume you have only a single drive attached to the WSL and it’s visible in the Linux subsystem as /dev/sdb. You can check it with the commands ‘sudo mount -t devtmpfs none /dev || mount | grep ext4’.
Now, let’s adjust the memory. Stop the WSL again. Open your home directory in Windows and open .wslconfig file. Create it if this file doesn’t exist yet. In the file, you need to create a [wsl2] section and memory configuration. The complete file should look like this:
[wsl2]
memory=16GB
As you can see, I’ve attached 16GB to the virtual machine. It’s assigned dynamically, according to needs, but you must be aware that the virtual machine can take all of it, so if you allow it to eat your entire RAM, it can force your Windows to use a hard disk to survive (which will slow everything down significantly).
Disclaimer:
Building Android on 8 cores, 16GB RAM machine takes around 4 hours. If you want to do it faster or you don’t have a computer powerful enough at your home or office, you can consider building in the cloud. Simple AWS EC2 with 32 cores and 64GB of memory does the job in one hour (to download and build) and costs just a few bucks.
Let’s Get Ready to Rumble!!!
..or at least to building.
More prerequisites
We need some software but not much. Just install the following packages. This set of libraries allows you to build Android Automotive OS versions 11 to 13.
sudo apt update && sudo apt install gcc-aarch64-linux-gnu libssl-dev bc python3-setuptools repo python-is-python3 libncurses5 zip unzip make gcc flex bison -y
Source code downloading
Let’s create a home directory for our android and download sources.
mkdir android-11.0.0_r48 && cd android-11.0.0_r48
repo init -u https://android.googlesource.com/platform/manifest -b android-11.0.0_r48 --partial-clone --clone-filter=blob:limit=10M
git clone https://github.com/android-rpi/local_manifests .repo/local_manifests -b arpi-11
repo sync
“repo init” will ask you for some personal data. It’s collected by Google. To learn more about optimizations here, check this manual: https://docs.gitlab.com/ee/topics/git/partial_clone.html. ‘git clone’ adds a custom code from Android RPI project (https://groups.google.com/g/android-rpi) with drivers for your Raspberry Pi. The project is great and it’s all you need if you want to run Android TV. To run Android Automotive OS, we’ll need to adjust it slightly (see “Adjustments” section below). ‘repo sync’ will take some time because you need to download around 200GB of code. If you have a powerful machine with a great Internet connection, you can use more threads with ‘-j X’ parameter added to the command. The default thread count is 4. If you have already synchronized your source code without android-rpi local manifest, you need to add –force-sync to the ’repo-sync’ command.
Adjustments
All changes from this section can download as a patch file attached to this article. See the “Path file” section below.
Android-rpi provides Android TV for Raspberry Pi. We need to remove the TV-related configuration and add the Automotive OS one.
Let’s start with removing unnecessary files. You can safely remove the following files and directories:
- device/arpi/rpi4/overlay/frameworks/base/core/res/res/anim
- device/arpi/rpi4/overlay/frameworks/base/core/res/res/values-television
- device/arpi/rpi4/overlay/frameworks/base/core/res/res/values/dimens.xml
- device/arpi/rpi4/overlay/frameworks/base/core/res/res/values/styles.xml
- device/arpi/rpi4/overlay/frameworks/base/packages
To remove the user notice screen not needed in Automotive OS, create a new file device/arpi/rpi4/overlay/packages/services/Car/service/res/values/config.xml with the following content:
<?xml version="1.0" encoding="utf-8"?>
<resources xmlns:xliff="urn:oasis:names:tc:xliff:document:1.2">
<string name="config_userNoticeUiService" translatable="false"></string>
</resources>
To replace the basic TV overlay config with the Automotive overlay config, adjust the configuration in device/arpi/rpi4/overlay/frameworks/base/core/res/res/values/config.xml.
Remove:
- <integer name=”config_defaultUiModeType”>4</integer> <!–disable forced UI_MODE_TYPE_TELEVISION, as there is only MODE_TYPE_CAR available now–>
- <integer name=”config_longPressOnHomeBehavior”>0</integer> <!–disable home button long press action–>
- <bool name=”config_hasPermanentDpad”>true</bool> <!–disable D-pad–>
- <string name=”config_appsAuthorizedForSharedAccounts”>;com.android.tv.settings;</string> <!–remove unnecessary access for a shared account as there is nothing in com.android.tv.* now–>
… and add:
- <bool name=”config_showNavigationBar”>true</bool> <!–enable software navigation bar, as there is no hardwave one–>
- <bool name=”config_enableMultiUserUI”>true</bool> <!–enable multi-user, as AAOS uses background processes called in another sessions –>
- <integer name=”config_multiuserMaximumUsers”>8</integer> <!–set maximum user count, required by the previous one–>
Now let’s rename the android-rpi original /device/arpi/rpi4/rpi4.mk to /device/arpi/rpi4/android_rpi4.mk. We need to adjust the file a little bit.
Remove the following variables definitions. Some of them you will re-create in another file, while some of them are not needed.
- PRODUCT_NAME
- PRODUCT_DEVICE
- PRODUCT_BRAND
- PRODUCT_MANUFACTURER
- PRODUCT_MODEL
- USE_OEM_TV_APP
- DEVICE_PACKAGE_OVERLAYS
- PRODUCT_AAPT_PRED_CONFIG
- PRODUCT_CHARACTERISTICS
Remove the following invocations. We’re going to call necessary external files in another mk file.
- $(call inherit-product, device/google/atv/products/atv_base.mk)
- $(call inherit-product, $(SRC_TARGET_DIR)/product/core_64_bit_only.mk)
- $(call inherit-product, $(SRC_TARGET_DIR)/product/languages_full.mk)
- include frameworks/native/build/tablet-10in-xhdpi-2048-dalvik-heap.mk
In PRODUCT_PROPERTY_OVERRIDES remove debug.drm.mode.force=1280×720 and add the following properties. This way you remove the TV launcher configuration and override the default automotive launcher configuration.
- dalvik.vm.dex2oat64.enabled=true
- keyguard.no_require_sim=true
- ro.logd.size=1m
Now you need to completely remove the android-rpi TV launcher and add RenderScript support for Automotive OS. In PRODUCT_PACKAGES remove:
- DeskClock
- RpLauncher
… and add:
- librs_jni
Create a new rpi4.mk4 with the following content:
PRODUCT_PACKAGE_OVERLAYS += device/generic/car/common/overlay
$(call inherit-product, $(SRC_TARGET_DIR)/product/core_64_bit.mk)
$(call inherit-product, device/arpi/rpi4/android_rpi4.mk)
$(call inherit-product, $(SRC_TARGET_DIR)/product/full_base.mk)
$(call inherit-product, device/generic/car/common/car.mk)
PRODUCT_SYSTEM_DEFAULT_PROPERTIES += \
android.car.number_pre_created_users=1 \
android.car.number_pre_created_guests=1 \
android.car.user_hal_enabled=true
DEVICE_PACKAGE_OVERLAYS += device/arpi/rpi4/overlay device/generic/car/car_x86_64/overlay
PRODUCT_NAME := rpi4
PRODUCT_DEVICE := rpi4
PRODUCT_BRAND := arpi
PRODUCT_MODEL := Raspberry Pi 4
PRODUCT_MANUFACTURER := GrapeUp and ARPi
Due to the license, remember to add yourself to the PRODUCT_MANUFACTURER field.
Now you have two mk files – android-rpi.mk is borrowed from android-rpi project and adjusted, and rpi.mk contains all changes for Automotive OS. You can meld these two together or split them into more files if you’d like, but keep in mind that the order of invocations does matter (not always, but still).
As Android Automotive OS is bigger than Android TV, we need to increase the system partition size to fit the new image. In device/arpi/rpi4/BoardConfig.mk increase BOARD_SYSTEMIMAGE_PARTITION_SIZE to 2147483648, which means 2GB.
You need to apply all changes described in https://github.com/android-rpi/device_arpi_rpi4/wiki/arpi-11-:-framework-patch too. Those changes are also included in the patch file attached.
If you use the 8GB version of Raspberry Pi, you need to replace device/arpi/rpi4/boot/fixup4.dat and device/arpi/rpi4/boot/start4.elf files. You can find the correct files in the patch file attached or you may use the official source: https://github.com/raspberrypi/firmware/tree/master/boot. It’s probably not needed for 4GB version of Raspberry, but I don’t have such a device for verification.
Path file
If you prefer to apply all changes described above as a single file, go to your sources directory and run ‘git apply –no-index <path_to_patch_file>’. There is also a boot animation replaced in the patch file. If you want to create one of your own, follow the official manual here: https://android.googlesource.com/platform/frameworks/base/+/master/cmds/bootanimation/FORMAT.md.
Now we can build!
That’s the easy part. Just run a few commands from below. Firstly, we need to build a custom kernel for Android. ‘merge_config.sh’ script just configures all variables required. The first ‘make’ command builds the real kernel image (which can take a few minutes). Next, build a device tree configuration.
cd kernel/arpi
ARCH=arm64 scripts/kconfig/merge_config.sh arch/arm64/configs/bcm2711_defconfig kernel/configs/android-base.config kernel/configs/android-recommended.config
ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- make Image.gz
ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- DTC_FLAGS="-@" make broadcom/bcm2711-rpi-4-b.dtb
ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- DTC_FLAGS="-@" make overlays/vc4-kms-v3d-pi4.dtbo
cd ../..
The next part is to build the entire system. “envsetup.sh” script sets up variables and adds custom commands to your terminal. Then you can pick the correct pair of Android versions and devices with “lunch”. You can run it without parameters to see (almost) all possible configurations. In this step, you can decide to build a system for dedicated hardware (eg. Dragonboard) and switch between phone/tablet/TV/wearable/automotive versions of Android. The last line is a real building. We can’t run just “make” or “m”, as documented in the official manual because we need to create three specific images to write them on an SD card and run them on Raspberry Pi. Replace “X” in ‘-j X’ with the number of threads you want to use. The default value is the number of logical processors on your computer.
source build/envsetup.sh
lunch rpi4-eng
make -j X ramdisk systemimage vendorimage
I hope you have a delightful book next to you because the last building takes a few hours depending on your hardware. Good news! If you need to adapt something and build again, in most cases you just need the three last lines (or even just the very last one) – to source the environment setup, to pick the lunch configuration, and to make ramdisk, system, and vendor images. And it takes hours for the first time only.
Creating an SD card
This step seems to be easy, but it isn’t. WSL doesn’t contain drivers for the USB card reader. You can use usbip to forward a device from Windows to the subsystem, but it doesn’t work well with external storage without partitions. The solution is a VirtualBox with Ubuntu installed. Just create a virtual machine, install Ubuntu, and install Guest Additions. Then you can connect the card reader and pass it to the virtual machine. If you’re a minimalist, you can use Ubuntu Server or any other Linux distribution you like. Be aware that using a card reader built into your computer may be challenging depending on drivers and the hardware connection type (USB-like, or PCI-e).
Now, you need to create a partition schema on the SD card. I assume the card is loaded to the system as /dev/sdb. Check your configuration before continuing to avoid formatting your main drive or another disaster. Let’s erase the current partition table and create a new one.
sudo umount /dev/sdb*
sudo wipefs -a /dev/sdb
sudo fdisk /dev/sdb
Now let’s create partitions. First, you need a 128MB active partition of the W95 FAT32 (LBA) type, second a 2GB Linux partition, third a 128MB Linux partition, and the rest of the card for user data (also Linux partition). Here’s how to navigate through fdisk menu to configure all partitions.
Welcome to fdisk (util-linux 2.37.2).
Changes will remain in memory only, until you decide to write them.
Be careful before using the write command.
Device does not contain a recognized partition table.
Created a new DOS disklabel with disk identifier 0x179fb9bc.
Command (m for help): n
Partition type
p primary (0 primary, 0 extended, 4 free)
e extended (container for logical partitions)
Select (default p):
Using default response p.
Partition number (1-4, default 1):
First sector (2048-61022207, default 2048):
Last sector, +/-sectors or +/-size{K,M,G,T,P} (2048-61022207, default 61022207): +128M
Created a new partition 1 of type 'Linux' and of size 128 MiB.
Command (m for help): a
Selected partition 1
The bootable flag on partition 1 is enabled now.
Command (m for help): t
Selected partition 1
Hex code or alias (type L to list all): 0c
Changed type of partition 'Linux' to 'W95 FAT32 (LBA)'.
Command (m for help): n
Partition type
p primary (1 primary, 0 extended, 3 free)
e extended (container for logical partitions)
Select (default p):
Using default response p.
Partition number (2-4, default 2):
First sector (264192-61022207, default 264192):
Last sector, +/-sectors or +/-size{K,M,G,T,P} (264192-61022207, default 61022207): +2G
Created a new partition 2 of type 'Linux' and of size 2 GiB.
Command (m for help): n
Partition type
p primary (2 primary, 0 extended, 2 free)
e extended (container for logical partitions)
Select (default p):
Using default response p.
Partition number (3,4, default 3):
First sector (4458496-61022207, default 4458496):
Last sector, +/-sectors or +/-size{K,M,G,T,P} (4458496-61022207, default 61022207): +128M
Created a new partition 3 of type 'Linux' and of size 128 MiB.
Command (m for help): n
Partition type
p primary (3 primary, 0 extended, 1 free)
e extended (container for logical partitions)
Select (default e): p
Selected partition 4
First sector (4720640-61022207, default 4720640):
Last sector, +/-sectors or +/-size{K,M,G,T,P} (4720640-61022207, default 61022207):
Created a new partition 4 of type 'Linux' and of size 26,8 GiB.
Command (m for help): w
The partition table has been altered.
Calling ioctl() to re-read partition table.
Syncing disks.
Be careful with the last partition – fdisk proposes creating an extended one by default, which is not needed in our use case.
If you don’t do it for the first time on the same card, you may see a warning that some partition already contains a file system signature. You can safely agree to remove it.
Partition #4 contains a ext4 signature.
Do you want to remove the signature? [Y]es/[N]o: Y
The signature will be removed by a write command.
Now, let’s supply file systems for the first and the last partitions.
sudo mkdosfs -F 32 /dev/sdb1
sudo mkfs.ext4 -L userdata /dev/sdb4
We won’t write anything to the last one, as it’s for user data only and will be filled by Android during the first boot. But we need to write some files for the first one. Let’s create a temporary mount directory under /mnt/p1 (like “partition 1”), mount it, and copy the necessary files from the Android built in the earlier section. It’s strange, but we’re going to copy files from one virtual machine (WSL) to another (VirtualBox). You can simply mount a wsl drive as a shared folder in VirtualBox. If you don’t see a WSL drive in your Windows Explorer, you can map it as a network drive using “\\wsl$\Ubuntu” path
sudo mkdir /mnt/p1
sudo mount /dev/sdb1 /mnt/p1
sudo mkdir /mnt/p1/overlays
cd <PATH_TO_YOUR_ANDROID_SOURCES_IN_WSL>
sudo cp device/arpi/rpi4/boot/* /mnt/p1
sudo cp kernel/arpi/arch/arm64/boot/Image.gz /mnt/p1
sudo cp kernel/arpi/arch/arm64/boot/dts/broadcom/bcm2711-rpi-4-b.dtb /mnt/p1
sudo cp kernel/arpi/arch/arm/boot/dts/overlays/vc4-kms-v3d-pi4.dtbo /mnt/p1/overlays/
sudo cp out/target/product/rpi4/ramdisk.img /mnt/p1
sudo umount /mnt/p1
sudo rm -rf /mnt/p1
If you’re looking at the official android-rpi project manual, there is a different path for vc4-kms-v3d-pi4.dtbo file. That’s OK – they use a symbolic link we are unable to use in this filesystem.
Sometimes, you can see an error message when creating an “overlays” directory. It happens from time to time, because “mount” returns to the console before really mounting the drive. In such a case, just call “mkdir” again. Be aware of that, especially if you’re going to copy-paste the entire listing from above.
Now, let’s copy the two remaining partitions. If you’re struggling with dd command (it may hang), you can try to copy big *.img files from WSL to VirtualBox first.
cd <PATH_TO_YOUR_ANDROID_SOURCES_IN_WSL>/out/target/product/rpi4/
sudo dd if=system.img of=/dev/sdb2 bs=1M status=progress
sudo dd if=vendor.img of=/dev/sdb3 bs=1M status=progress
Congratulations!
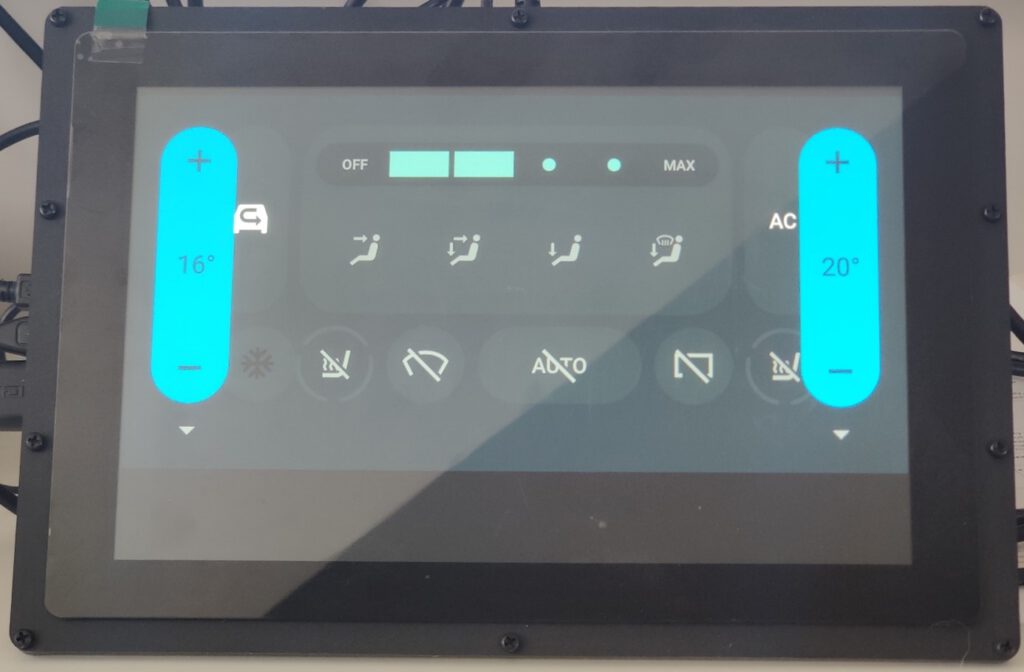
You’re done. You’ve downloaded, prepared, built, and saved your own Android Automotive OS. Now you can put the SD card into Raspberry, and connect all cables (make sure you connect the Raspberry power cable at the end). There is no “power” button, and it doesn’t matter which micro-HDMI or USB port of Raspberry you use. It’s now time to enjoy your own Android Automotive OS!
If it doesn’t work
The world is not perfect and sometimes something goes terribly wrong. If you see the boot animation for a long time, or if your device crashes in a loop a few seconds after boot, you can try to debug it.
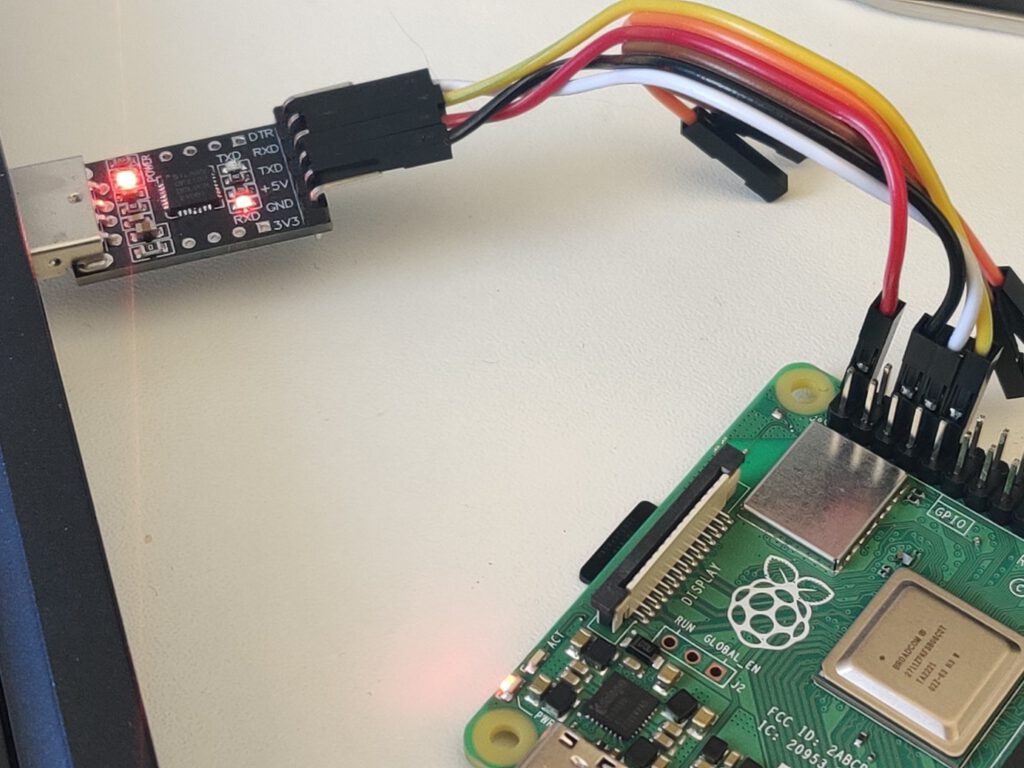
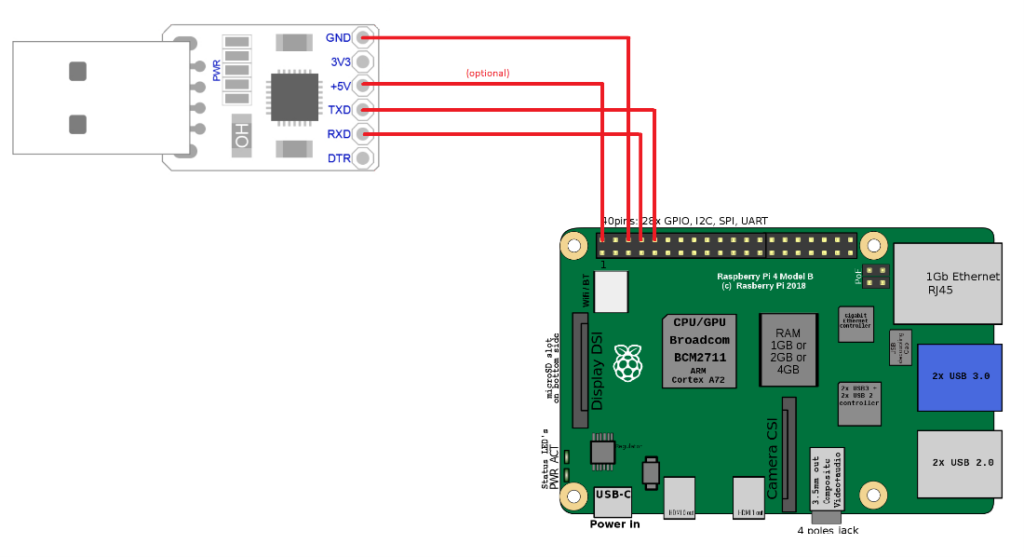
You need a USB-TTL bridge (like this one https://www.sunrom.com/p/cp2102-usb-ttl-uart-module) to connect the correct pins from the Raspberry to the USB. You need to connect pin 6 (ground) to the GND pin in the bridge, pin 8 (RXD) to the RXD pin of the bridge and pin 10 (TXD) to the TXD pin of the bridge. If you want to power the Raspberry via the bridge, you need to also connect pin 2 to +5V pin of the bridge. It is not recommended, because of the lower voltage, so your system might be unstable. If you don’t have a power adapter, you can simply connect a USB cable between your computer port and the USB C port of the Raspberry. Warning! You can’t connect both a +5V connector here and a USB C power port of the Raspberry or you’ll burn the Raspberry board.
See the schema for the connection reference.
Depending on your bridge model, you may need an additional driver. I use this one: https://www.silabs.com/developers/usb-to-uart-bridge-vcp-drivers?tab=downloads.
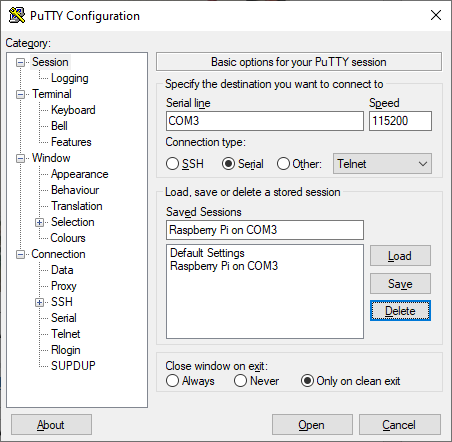
When you connect the +5V pin or USB-C power adapter (again, never both at the same time!), the Raspberry starts. Now you can open Putty and connect to your Android. Pick Serial and type COMX in the serial line definition. X is the number of your COM port. You can check it in your device manager – look for “USB to UART bridge (COM4)” or the like. The correct connection speed is 115200.
Open the connection to access the Android shell. By default, Android spawns all logs to the standard output, so you should see a lot of them right away. Anyway, it’s dual-side communication and you have full terminal access to your Android if you need to check/modify any file or call any command. Just strike enter to see the command prompt. You can even call ‘su’ to gain superuser access on your Android running on Raspberry.
Connecting via adb
If you want to use Android Debug Bridge to connect to your device, using a USB bridge is not enough. When running ‘adb devices’ on your computer, the Android Automotive OS running on Raspberry is not recognized. You can use a putty connection to turn on a TCP debug bridge instead.
Make sure you’ve connected Android and your computer to the same network. Open putty and connect to the running Android console. Log as root and enable ADB via TCP. Then check your IP address.
su
setprop service.adb.tcp.port 5555
stop adbd
start adbd
ifconfig wlan0
Now, using your Windows command line, go to the Android SDK platform-tools directory and connect to your device. As you can see, the IP address of mine Raspnberry is 192.168.50.47.
cd %userprofile%\AppData\Local\Android\Sdk\platform-tools
adb connect 192.168.50.47:5555
If you want to use ADB in WSL, you can link the Windows program in WSL using the following command.
sudo ln -s /mnt/c/Users/<your_username>/AppData/Local/Android/Sdk/platform-tools/adb.exe /usr/bin/adb
You can now use ADB to use logcat without putty or to install applications without manually transferring APK files to the SD card. Fun fact – if you use a USB bridge and USB power supply, you have two physical connections between your computer and the Android-running one, however, you still need to use ADB over WiFi to use the debug bridge.
Summary: Android Automotive OS on Raspberry Pi 4B
That’s all. Android Automotive OS 11 is running. You can install the apps you need, take them to your car, or do whatever you’d like with them. Using hardware instead of an emulator allows you to manually manage partitions (e.g. for the OTA update) and connect external devices like a real GPS receiver or accelerometer. The bare metal hardware overperforms the emulator too. And most importantly – you can easily take it to your car, receive power from an in-car USB port, connect it to an ODB-II port and run real-life tests without a laptop.
Is your project ready? Great, now you can try doing the same with AAOS 13.
Is it insightful?
Share the article!
Check related articles
Read our blog and stay informed about the industry's latest trends and solutions.
see all articles


How Automotive Open Source Technologies Accelerate Software Development in the Automotive Industry
Read the article