How to build software architecture for new mobility services - connected vehicle remote control

Remote control over a vehicle is not a new idea; it has become a trend in the modern world. The idea of vehicle remote control is highly connected with vehicle telematics , which is used to gather data using GPS technology, sensors, and onboard diagnostics codes. Managed data can include vehicle location, driver behavior, vehicle activity, and real-time engine diagnostics. Further, the technology is managed on software platforms that help fleet owners manage their assets remotely.
The data collected often includes vehicle location, fuel consumption, speeding, and maintenance information. But what if a car got stolen? It would be helpful not only to have the current location but also to send a command to a vehicle to turn the engine off or enable signalization. A huge problem in this case is to have a platform that will be independent of the Original Equipment Manufacturer (OEM). The best option here is to move the solution to the Cloud and introduce a single point of work with vehicles and integration with different OEMs.
Such telematics remote control gives a powerful opportunity to car-rental or car-sharing services like CityBee or SnapCar. They now can track their cars and also offer customers a no-human way to reserve a car using just a mobile application and know the current vehicle state when it is in use.
Vehicle connection
To establish connection to a car it’s necessary to equip the vehicle with an Internet-connected telemetry device. Some companies provide such a device as part of machine installation, but third-party tools like Geotab can be used for custom installation as well. It is important to have a device intended for two-way connection with a vehicle, as some solutions were created only for tracking purposes. Remote vehicle controllers like Mobokey offer the following commands on a vehicle:
- Lock/Unlock
- Turn engines on/off
- Klaxon sound
- Turn flash-lights on/off
- Wake up/sleep
- Connect/Disconnect the vehicle
Some manufacturers require their cars to be woken up explicitly before executing actual commands. It is intended to prevent the continuous connection or in case of low battery level.
Software solution
Once the two-way connection with a vehicle is established, we need a solution to track the actual status of a car and send commands. To do that, it is required:
- To make sure integration with a vehicle is completed successfully
- That the connection is secure
- That the command can be sent by us – it may differ depending on the manufacturer and model
and that we prepared:
- Dashboard to send commands
- Response handling - to be aware if command execution was successful
The damage caused by a successful attack on a vehicular telematics system because of an unsecured connection may range from mild to disastrous - to the extent of serious casualties and property losses. To enforce the security objectives for deployed and developing vehicular monitoring systems, embodiments of the disclosed technology include a stack of security approaches, both on physical and software levels.
As vehicle commands are sent over the Internet, it is important to have a network and infrastructure security built. The software solution stack must be enclosed in a Virtual Private Cloud (VPC). Apart from that, it is highly recommended to apply some best practices such as Static Application Security Testing (SAST), Interactive Application Security Testing (IAST), and Software Composition Analysis (SCA) to find vulnerabilities.
Another challenge in software solutions relates to the need for integration with different OEMs . Each OEM provides an API to integrate with and different ways of communication with vehicles - it may be a synchronous way, for example, HTTP request to REST API, or an asynchronous way, for instance, using queue-based protocols like MQTT.
Another issue is handling command execution responses or callbacks . The easiest way to implement this is when the OEM API synchronously responds with a command execution result, but in most cases, the OEM system may notify us about the execution result eventually in some time.
In this case, it is necessary to find a way to map a command request to a vehicle via OEM API and an execution response as it is used for retry policy, error handling, and troubleshooting.
Software architecture
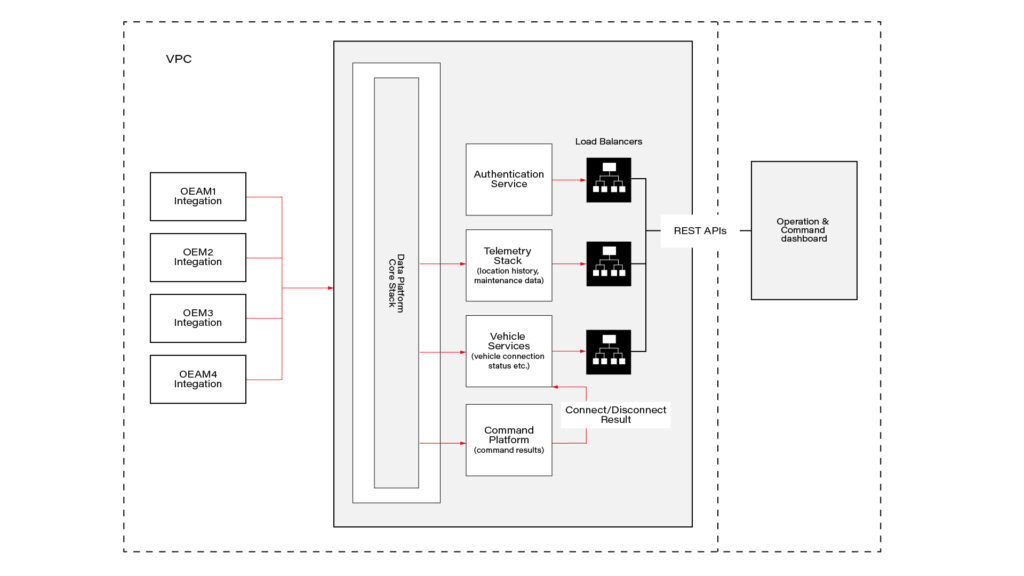
This connected vehicle solution uses the IoT platform, which authenticates messages from connected vehicles and processes data according to business rules. It leverages a set of main services, including Vehicle Services to connect vehicles and store vehicle-related data, a Telemetry stack to collect a delivery stream of input events and write them into Database, Command Services to send commands to the car and combine execution responses; and a queue-based topic which is intended for inter-communication between different parts of the system.
The solution also includes integration with OEM APIs. When IoT receives a message, it authenticates and authorizes the message, and the Command Platform executes the appropriate rule on the message, which routes the message to the appropriate OEM integration.
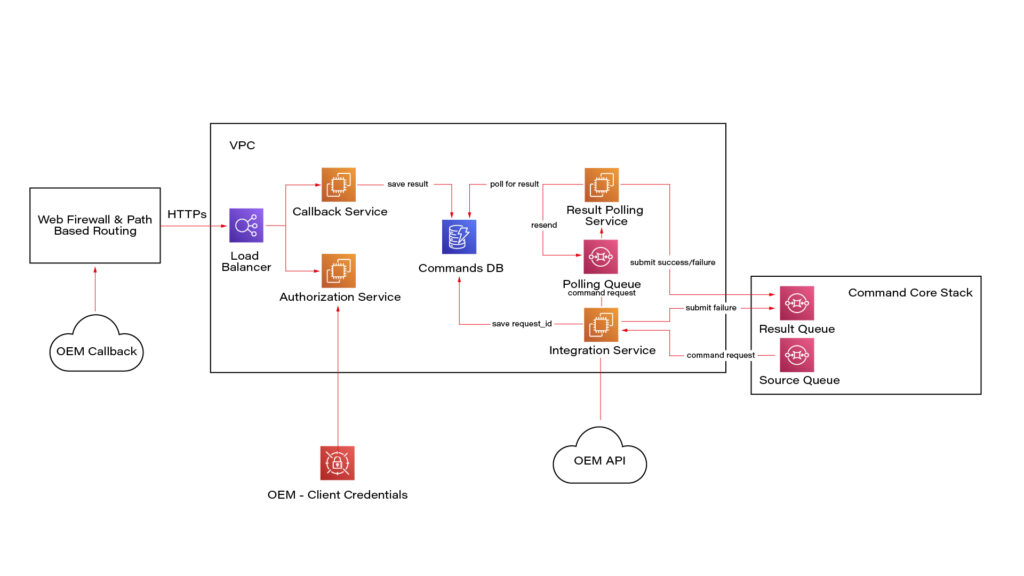
Here we see a potential OEM integration with the IoT Platform. It has authorization integration to allow us to send request OEM API securely; Callback integration to keep OEM response data regarding command execution; Database to keep mapping and consistent result - command request vs response; retry mechanism implementation using polling results from the database.
Once the system is authenticated, requests can be submitted to the connected vehicle solution’s OEM APIs. Based on the request identification data, the system eventually waits for the command result using a callback mechanism.
Conclusion
As highly-equipped connected vehicles increasingly rely on data exchanged with the infrastructure, it is required to have sustainable infrastructure, well-built cyber-security, privacy, and safety taken into account. The proposed solution also pays respect to the need to enroll in this process vehicle from different manufacturers.
This solution with remote vehicle control may be extremely useful for car-sharing systems, and apart from that, it can cover a solution for such use cases as autonomous and semi-autonomous vehicle driving, usage-based insurance, and customized in-vehicle experience . The solution also includes two-way communication.

Data powertrain in automotive: Complete end-to-end solution
We power your entire data journey, from signals to solutions
Check related articles
Read our blog and stay informed about the industry's latest trends and solutions.
How new mobility services change the automotive industry
The automotive industry is changing right before our very eyes. Today, services based on the CASE model are looming on the horizon. They are capturing an increasing market share and gaining more and more each year in total dollar value. What's in store for the automotive sector and how automotive enterprises can seize these opportunities?
New mobility services are emerging rapidly
By 2030, over 30 percent of the projected increase in vehicle sales due to urbanization and macroeconomic growth will be unlikely to happen owing to the shared mobility expansion.
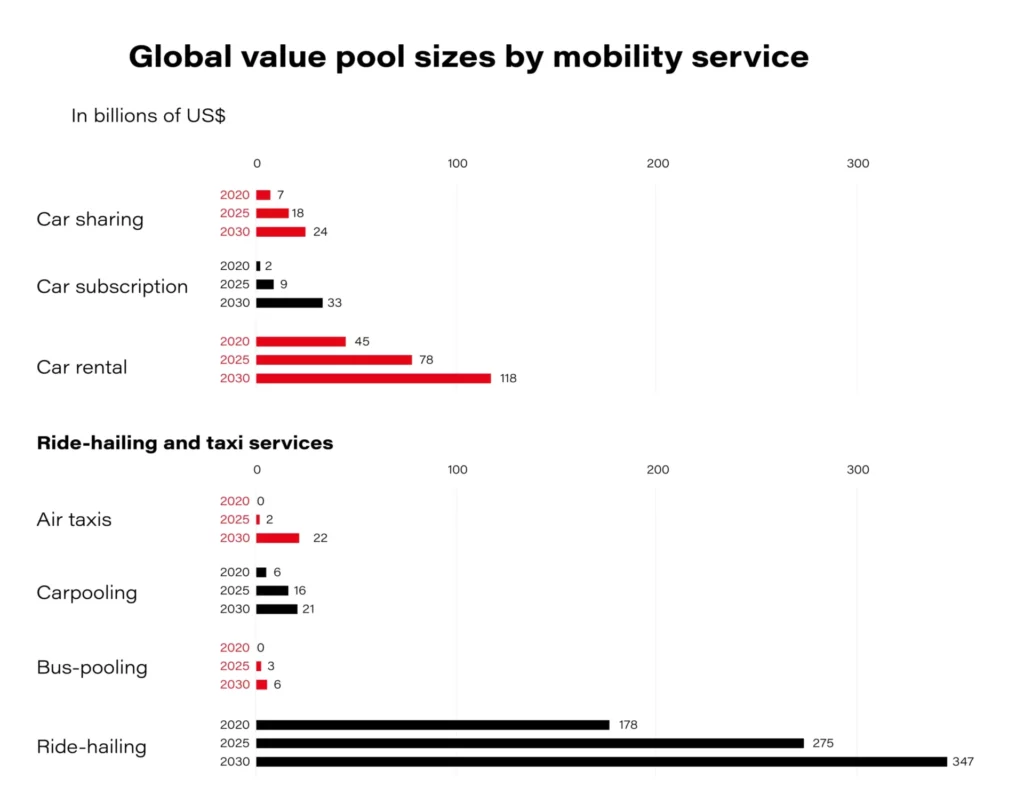
In China, the European Union, and the United States, which are countries supporting shared mobility solutions , the mobility market could reach 28 percent annual growth from 2015 to 2030 . Of course- this would be the most optimistic scenario. FutureBridge specialists expect the shared mobility market to grow significantly over the next five to seven years at a CAGR of 16 percent from 2018, reaching 180 billion dollars by 2025 . How can the growing demand for new mobility services be explained?
On the one hand, the automotive industry deals with changing consumer preferences . One travels by car covering shorter distances, but much more frequently. And it doesn’t have to be by car at all, as new means of transportation are becoming more accessible.
On the other hand, soaring car prices (though cars lose their value a few months after the purchase) prompt us to search for other, cheaper alternatives that provide optimal driving comfort anyway.
How will companies relying on the traditional car ownership model respond to this trend? They will provide new services such as substitution models, in which, for a once-off monthly payment, you can have a new car with insurance, maintenance, roadside assistance, etc. Subscriptions will soon account for about 15% of new car sales and should have risen to 25% by 2025. In this context, new mobility in the form of rental and ride-sharing services, which are also part of the transformation on the roads, also becomes significant.
The third thing is growing technology, based on the CASE model(Connectivity, Autonomous driving, Shared mobility, Electrification,) that empowers the development of new mobility services on an unprecedented scale. According to Microsoft experts, by 2030 virtually all new cars will have been connected devices, functioning as data centers on wheels.
6 leading new mobility services
Carsharing
A short-term car rental model that allows users to choose a vehicle and pick-up/drop-off location. Users can determine vehicles and flexible rent times. Operators gain high ROI with high utilization and minimal staffing.
Examples: citybee, E-VAI, fetch
Ride-hailing
A form of cab rental in which the drivers are usually contractors using their private vehicles rather than direct employees. The user has immediate availability and payment is handled through the operator. The benefits are also the ability to track and monitor journeys. For operators instead, traditional fleet costs must be handled by the drivers. It’s an easily scalable service.
Examples: Uber, Lyft, Bolt, marcel, OLA
P2P Sharing
this service allows vehicle owners to rent their vehicles when they are not currently in use. BMW-run ReachNow is piloting a version of this type of service, which allows Mini owners to offer their currently unused vehicles for rent. The benefits for users are the lower costs than traditional vehicle rental. Meanwhile, the operator has no fleet to manage and gets access to an easily scalable model of business.
Examples: HoppyGo, SnappCar
Carpooling
Allows users to join an already scheduled trip. The operating company acts as an "intermediary" through which rides can be announced and joined. Carpooling can apply both to people taking a trip alone and to those who want to share rides to reduce the total cost of the trip for a single passenger. It’s a cheap and environmentally friendly service. What is more, the operator has a higher margin per ride and no fleet to manage.
Examples: BlaBlaCar, GoMore, liftshare
Car rental
The evolution of the traditional car rental by the day, allowing users to rent cars for different periods without the traditional hassle associated with this type of service. From the user's point of view, such new services enable an easier and quicker process of vehicle rental. Also, it’s possible to choose a vehicle before finalizing the rental. In turn, the operator has less staffing than a traditional rental and can utilize already existing fleets.
Examples: Audi Silvercar, Hertz, Sixt, PORSCHE DRIVE, UBEEQO
Multimodal
An integrator of public transport mobility services, as well as other modes of transportation, such as public transportation, rail networks, and even cabs. The goal of such services is to get people from their starting point to their destination in the fastest, cheapest, or most efficient way, depending on individual needs. In this model, the operator gets access to additional potential users and has relatively low costs of deployment due to a lack of physical assets.
Examples: FREE2MOVE, whim, Google Maps
Which new mobility services are growing the fastest?
Of the 55 providers of the aforementioned new mobility services operating in European countries, the most popular are those in the area of carsharing (51%) . The second most popular are car rental services (20%) , followed by P2P sharing (13%) .
In terms of ownership, most new mobility services were OEM owned (over 36%), although many of them were independent (over 38%). Also included were OEM invested services (31%).
Technologies and functionalities fueling the development of new mobility services
Mobility services are based on advanced software that uses, at least, the Internet of Things, to transfer data from the vehicle to the cloud. Then the individual information is available on the user's mobile application.
For services based on unmanned vehicle rental, modern security features have been considered when it comes to opening and closing the car.
With a view to minimizing possible problems, the developers of digital new mobility services are also introducing a fault reporting option.
Below is a selection of the most common functionalities and technologies in detail for each new mobility service in Europe.
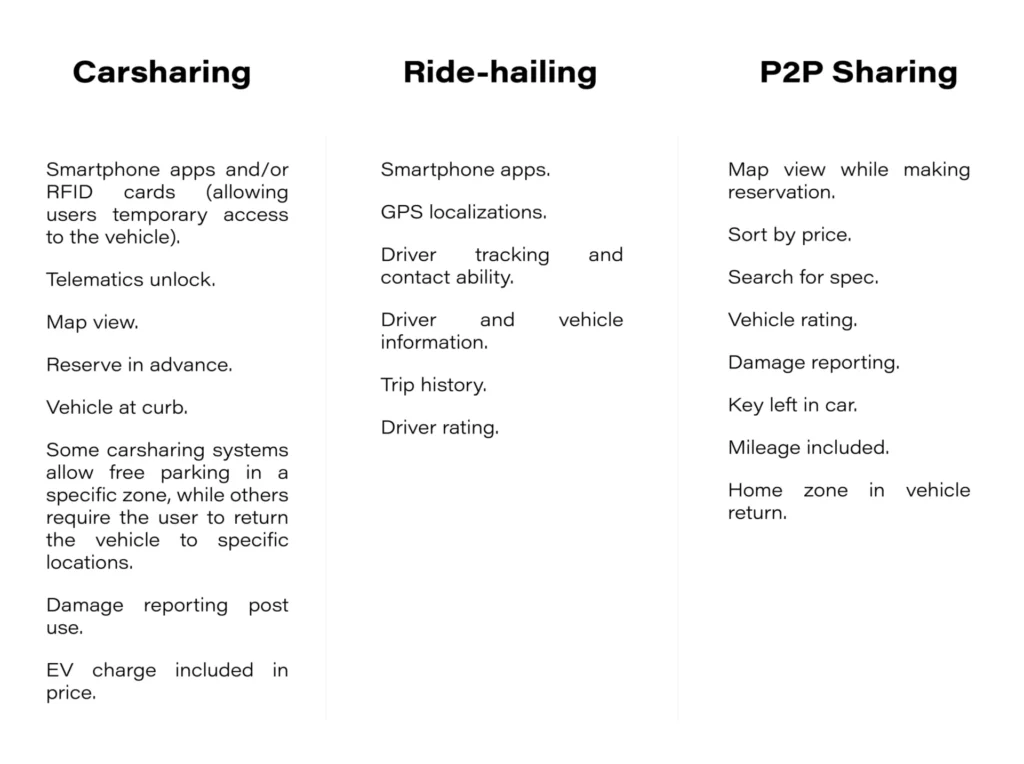
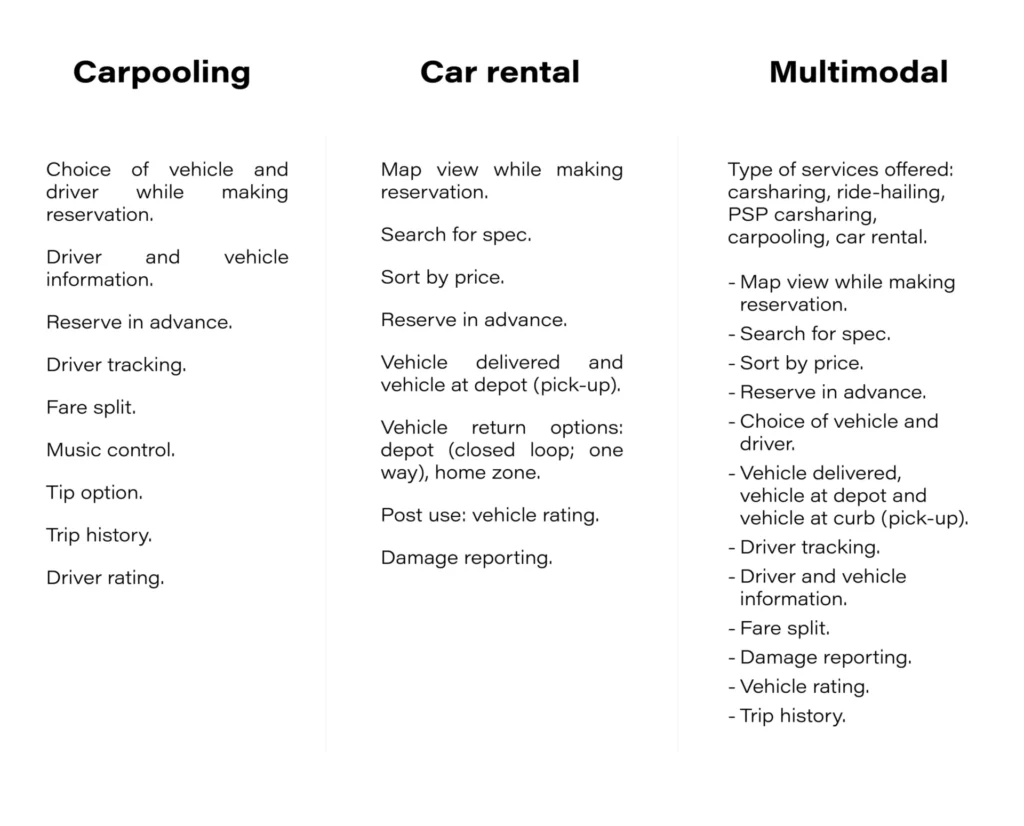
All of these and other options provide guidance and a certain pattern of behavior for future developing OEMs.
Key factors crucial for the development of new mobility services
CASE trends provide new opportunities for the vehicles of the future. However, the interrelationships between software, in-car sensors, and electronic systems require a huge amount of resources , especially when we are talking about reliable operations that translate into a competitive advantage of new mobility services and popularity among potential users.
Therefore, if you want to develop in this area, consider at least these few factors.
- Cybersecurity . In addition to creating huge amounts of code, what also matters is that your user data tracking processes comply with the standards and regulations that apply in your geographic region.
- Careful listening to user needs. In order to compete with technology start-ups, OEMs should focus on innovative digital solutions oriented towards actual consumer expectations . What matters is flexibility, when it comes to the portfolio of functionalities.
- Certainly, emotion is a factor that must be taken into account. Solution providers should care about providing unique experiences and sensations that will make the user eager to re-use a particular service, and in the process, spread it to their community.
- Flexibility and scalability . You need to be prepared not only to meet the changing expectations of customers who come in with feedback but also to expand functionality to include those that competitors already have (or to offer completely innovative solutions).
- Being ready to expand the offering . For example, with new types of vehicles: not only internal combustion but also hybrid, electric; not only cars but also city scooters, etc.
If you want to deal with the challenges that come with developing new mobility services and are considering the above and other growth factors, contact Grape Up. We can help you expand your business in terms of features and values appreciated by today's conscious consumers.
How to build software architecture for new mobility services - gathering telemetry data
In the modern world, tech companies strive to collect as much information as possible about the status of owned cars to enable proactive maintenance and rapid responses to any incidents that may occur. These incidents could involve theft, damage, or the cars simply getting lost. The only way to remotely monitor their status is by obtaining telemetry data sent by the vehicles and storing it on a server or in the cloud. There are numerous methods for gathering this data, but is there an optimal approach? Is there a blueprint for designing an architecture for such a system? Let's explore.
What does “telemetry” mean in a car?
This article is about gathering telemetry data, so let's begin with a quick reminder of what it is. Telemetry in cars refers to the technology that enables the remote collection and transmission of real-time data from various components of a vehicle to a central monitoring system. This data encompasses a wide range of parameters, including, for example:
- engine performance,
- fuel consumption,
- tire pressure,
- vehicle speed,
- percentage of electric vehicle battery,
- braking activity,
- acceleration,
- GPS position,
- odometer
Collecting vehicle details is valuable, but what is the real purpose of this information?
Why collect telemetry data from a car?
The primary use of telemetry data is to monitor a car's status from anywhere in the world, and it's especially crucial for companies like car rental firms such as Hertz or Europcar, as well as transportation companies like Uber. Here are some examples:
- Tracking Stolen Cars : Companies can quickly track a stolen vehicle if they store its GPS position.
- Accident Analysis : If a car is involved in an accident, the company can assess the likelihood of the event by analyzing data such as a sudden drop in speed to zero and high acceleration. This allows companies to provide replacement cars promptly.
- Fuel or Charging Management : In cases where a rental car is returned without a full tank of fuel or not fully charged, the company can respond quickly to make the car available for the next rental.
These are just a few examples of how telemetry data can be utilized, with many more possibilities. Understanding the value of telemetry data, let's delve into the technical aspects of acquiring and using this data in the next part of the article.
To begin planning the architecture, we need answers to some fundamental questions
How will the telemetry data be used?
Architectural planning should commence with an understanding of the use cases for the collected telemetry data. This includes considering what the end user intends to do with the data and how they will access it. Common uses for this data include:
- Sharing data on a dashboard : To enable this, an architecture should be designed to support an API that retrieves data from databases and displays it on a dashboard,
- Data analytics : Depending on the specific needs, appropriate analytic tools should be planned. This can vary from real-time analysis (e.g. AWS Kinesis Data Analytics) to near real-time analysis (e.g. Kafka) or historical data analysis (e.g. AWS Athena),
- Sharing data with external clients : If external clients require real-time data, it's essential to incorporate a streaming mechanism into your architecture. If real-time access is not needed, a REST API should be part of the plan.
Can we collect the data from cars?
We should not collect any data from cars unless we either own the car or have a specific legal agreement to do so. This requires not only planning the architecture for acquiring access to the car but also for disposing of it. For example, if we collect telemetry or location data from a car through websockets and the company decides to sell the car, we should immediately cease tracking the car. Storing data from it, especially location data, might be illegal as it could potentially allow tracking of the location of a person inside the car.
How do we manage permissions to the car?
If we have legal permission to collect data from the car, we must include correct permission management in our architecture. Some key considerations include:
- Credential and token encryption,
- Secure storage of secrets, such as using AWS Secret Manager,
- Regular rotation of credentials and tokens for security,
- Implementing minimum access levels for services and vehicles,
- Good management of certificates,
- Adhering to basic security best practices.
How do we collect the data?
Now that we have access to the data, it's time to consider how to collect it. There are several known methods to do this:
- Pull Through REST/GRPC API: In this scenario, you'll need to implement a data poller. This approach may introduce latency in data acquisition and is not the most scalable solution. Additionally, you may encounter request throttling issues due to hitting request limits.
- External Service Push Through REST/GRPC: Here, you should set up a listener, which is essentially a service exposed with an endpoint, such as an ECS task or a Lambda function on AWS. This method might incur some costs, and it's crucial to consider automatic scaling to ensure no data is lost. Keep in mind that the endpoint will be publicly exposed, so robust permission management is essential.
- Pulling From a Stream: This approach is often recommended as it's the most scalable and secure option. You can receive data in real-time or near real-time, making it highly efficient. The primary considerations are access to the stream and the service responsible for pulling data from it.
- Queues: Similar to streams, queues can be used for data collection, and they may offer better data ordering. However, streams are typically faster but might be more expensive. This is another viable option for collecting vehicle data from external services.
- Websockets: Websockets are a suitable solution when bidirectional data flow is required, and they can be superior to REST/GRPC APIs in such cases. For example, they are an appropriate choice when a client needs confirmation that data has been successfully acquired. Websockets also allow you to specify which telemetry data can be acquired and at what frequency. A notable example is the Tesla Websockets ( https://github.com/teslamotors/fleet-telemetry/blob/main/protos/vehicle_data.proto ).
Where to store the data?
After collecting the data, it's important to decide where to store it. There are various databases available, and the choice depends on your specific data use cases and access patterns. For instance:
- Commonly Used Data : For data that will be frequently accessed, you can opt for a traditional database like MongoDB or PostgreSQL.
- Low-Maintenance Database : If you prefer a database that requires minimal maintenance, AWS DynamoDB is a good choice.
- Infrequently Used Data for Analytics : When data won't be used frequently but will be utilized for occasional data analytics, you can consider using an AWS S3 bucket with the appropriate storage tier, coupled with AWS Athena for data analysis.
- Complex Data Analysis : If the data will be regularly analyzed with complex queries, AWS Redshift might be a suitable solution.
When planning your databases, don't forget to consider data retention. If historical data is no longer needed, it's advisable to remove it to avoid excessive storage costs.
Example
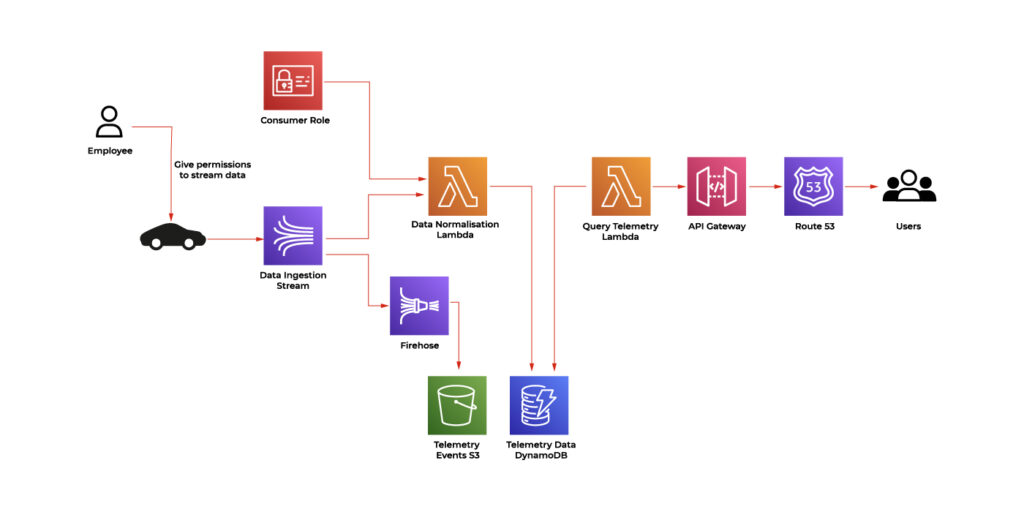
Here is an example of such an architecture on AWS in which:
- An employee grants permissions to the car to stream the data.
- The data is streamed using AWS Kinesis Stream and saved to an S3 bucket by AWS Kinesis Firehose for audit purposes.
- The data is also normalized by the AWS Lambda function and stored in AWS DynamoDB.
- The stored data is queried by another AWS Lambda function.
- The query Lambda is triggered by an AWS API Gateway to enhance security, such as limiting requests per second.
- The API is exposed via Route 53 to the end user, which can be, for example, a dashboard or an external API.
Conclusion
In the modern tech landscape, the quest for complete vehicle data is a paramount objective. Tech companies seek to collect critical information about the status of owned cars to enable proactive maintenance and rapid responses to a spectrum of incidents, from theft and damage to simple misplacement. This imperative relies on the remote monitoring of vehicles through the collection and storage of data on servers or in the cloud, offering the capability to monitor a vehicle's status from any corner of the globe. This is especially essential for companies like car rental firms and transportation services, with applications ranging from tracking stolen cars through GPS data to analyzing accident events and managing fuel or charging for rental vehicles.
The core of this mission is to strike a balance between data collection, security, and architectural planning. The process involves careful consideration of data collection methods, adherence to legal and security best practices, and informed choices for data storage solutions. The evolving landscape of vehicle data offers endless possibilities for tech companies to harness the power of telemetry and deliver an enhanced experience for their customers.
Developing software for connected cars - common challenges and how to tackle them
Automotive is transforming into a hyper-connected, software-driven industry that goes far beyond the driving experience. How to build applications in such an innovative environment? What are the main challenges of providing software for connected cars and how to deal with them? Let’s dive into the process of utilizing the capabilities of the cloud to move automotive forward.
People have always aimed for the clouds. From Icarus in Greek mythology, first airplanes and spaceships to dreams about flying cars – our culture and history of technology development express a strong desire to go beyond our limits. Although the vision from Back to the Future and other Sci-Fi movies didn’t come true and our cars cannot be used as flying vehicles, our cars actually are in the cloud.
Meanwhile, the idea of the Internet of Things came true; our devices are connected to the Internet . We have smartphones, smartwatches, smart homes and, as it turns out, smart cars. We are able to communicate with them to gather data or even remotely control them. The possibilities are only limited by hardware, but even it is constantly improving to follow the pace of rapid changes triggered by software development.
Offerings on the automotive market are developing rapidly with numerous features and promised experiences to the end customer. By using cutting-edge technologies, utilizing cloud platforms, and working with innovative software developers, automakers provide solutions to even the most demanding needs . And while our user experience is improving at an accelerated pace, there is still a broad list of challenges to tackle.
In this article, we dive into the technology behind the latest trends, take into account the most demanding areas of developing software in the cloud, and explain how proper solution empowers the change that affects us all.
Challenging determinants of the cloud revolution in automotive
Connecting with your car through a smartphone or utilizing information about traffic provided to your vehicle thanks to the platforms that accumulate data registered by other drivers is extremely useful.
Those innovative changes wouldn’t be possible without cloud infrastructure . And as there is no way back from moving to the cloud, the transition creates challenges in various areas: safety, security, responsiveness, integrity , and more.
Safety in the automotive sector
How to create a solution that doesn’t affect the safety of a driver? When developing new services, you cannot forget about the basics. Infotainment provided to vehicles is more advanced for every new release of a car and can be really engaging. The amount of delivered information combined with increasingly larger displays may lead to distraction and create dangerous situations. It’s worth mentioning that some of the colors may even impair the driver’s vision!
Integration with the cloud usually enables some of the remote commands. When implementing them, there are a lot of restrictions that need to be kept in mind. Some of them are obvious, such as you don’t want to disable the engine when a car is being driven 100km/h, but others may be much more complicated and unseen at first.
Providing security for car owners
Enabling services for your vehicle in the cloud, despite being extremely helpful to improve your experience, creates another way to break into your car. Everyone would like to open a car without using keys, but using a mobile phone, voice, or a fingerprint instead. And as these solutions seem modern and fancy, there is a big responsibility on the software side to do it securely.
Responsiveness enabling the seamless user experience
Customer-facing services need to deliver a seamless experience to the end-user. The customer doesn’t want to wait a minute or even ten seconds for unlocking a car door. These services need to do it immediately or not at all, as an issue with opening the doors just because the system had a ‘lag’ is not acceptable behavior.
Data integrity is a must
Another very important concept associated with providing solutions utilizing cloud technologies is data integrity. Information collected by your vehicle should be useful and up to date. You don’t want a situation when the mobile application says that the car has a range of 100km, but in the morning, it turns out that the tank is almost empty, and you need to refuel it before going to work.
How to integrate and utilize mobile devices to connect with your vehicle?
When discussing how to use mobile phones to control cars, a very important question occurs; how to communicate with the car? There is no simple answer, as it all depends on what model and version of a car it is, as depending on a provider, the vehicles are equipped with various technologies. Some of them are equipped with BLE, Wi-Fi Hotspots, or RFID tags, while others don’t offer a direct connection to the car, and the only way is to go through the backend side. Most of the manufacturers will expose some API over the Internet without providing a direct connection from mobile to the car. In such cases, usually, it’s a good practice to create your own backend which handles all API flaws. To do so, your system will need a platform to have a reliable solution.
When the limitation of hardware is met, there is always an option to equip the car with a custom device, which will expose a proper communication channel and will be integrated with the vehicle. To do so, it may use the OBD protocol. It gives us full control over the communication part, however, it’s expensive and hard to maintain the solution.
Building a platform to solve the challenges
There is no simple answer on how to solve the mentioned challenges and implement a resilient system that will deliver all necessary functionalities with the highest quality. However, it’s very important to remember that such a solution should be scalable and utilize cloud-native patterns. When designing a system for connected cars, the natural choice is to go with the microservice architecture. The implementation of the system is one thing, and partly this topic was covered in the previous article , but on the other hand, the very important aspect is a runtime, the platform. Choosing the wrong setup of virtual machines or having to deploy everything manually can lead to downtime of the system. Having a system that isn’t available for the customer constantly can damage your business.
Kubernetes to the rescue! As probably you know, Kubernetes is a container orchestration platform, which allows running workload in pods. The platform itself helped us to deliver many features faster and with ease to our clients. Nowadays, Kubernetes is so easily accessible that you can spin up a cluster in minutes using existing service providers like AWS or Azure. It allows you to increase the speed of delivery of new features, as they may be deployed immediately! What’s very important with Kubernetes, is its abstraction from infrastructure. The development team with expertise in Kubernetes is able to work on any cloud provider. Furthermore, mission-critical systems can successfully implement Kubernetes for their use cases as well.
Automotive cloud beyond car manufacturers
Automotive cloud is not only a domain of car manufacturers. As mentioned earlier, they offer digital services to integrate with their cars, but numerous mobility service providers integrate with these APIs to implement their own use cases.
- Live notifications
- Online diagnostics
- Fleet management
- Vehicle recovery
- Remote access
- Car sharing
- Car rental
The best practices of providing cloud-native software for the automotive industry
Working with the leading auto motive brands and being engaged in numerous projects meant to deliver innovative applications. Our team have collected a group of helpful practices which make development easier and improve user experience. There are some must-have practices when it comes to delivering high-quality software, such as CI/CD, Agile, DevOps, etc., – they are crucial yet well-known for the experienced development team and we don’t focus on them in this article. Here we share tips dedicated for teams working with app delivery for automotive.

Containerize your vehicle
One of the things we’ve learned collaborating with Porsche is that vehicles are equipped with ECUs and installing software on them isn’t easy. However, Kubernetes helps to mitigate that challenge, as we can mock the target ECU by docker image with specialized operating systems and install software directly in it. That’s a good approach to create an integration environment that shortens the feedback loop and helps deliver software faster and better.
Asynchronous API
In the IoT ecosystem, you can’t rely too much on your connection with edge devices. There are a lot of connectivity challenges, for example, a weak cellular range. You can’t guarantee when your command to the car will be delivered and if the car will respond in milliseconds or even at all. One of the best patterns here is to provide the asynchronous API. It doesn’t matter on which layer you’re building your software if it’s a connector between vehicle and cloud or a system communicating with the vehicle’s API provider. Asynchronous API allows you to limit your resource consumption and avoid timeouts that leave systems in an unknown state.
Let’s take a very simple example of a mobile application for locking the car remotely.
Synchronous API scenario
- A customer presses a button on the application to lock the car.
- The request is sent and is waiting for a response.
- The request needs to be delegated to the car which may take some time.
- The backend component crashes and starts without any knowledge about the previous request.
- The application gets a timeout.
- What now? Is the car locked? What should be displayed to the end-user?
Asynchronous API scenario
- The customer presses a button on the application to lock the car.
- The request is sent and ended immediately.
- The request needs to be delegated to the car which may take some time.
- The backend component crashes and starts without any knowledge about the previous request.
- The car sends a request with the command result through the backend to the application.
- Application displays: “Car is locked.”
With asynchronous API, there’s always a way to resend the response. With synchronous API, after you lose connection, the system doesn’t know where to resend response out of the box. As you may see, the asynchronous pattern handles this case perfectly.
Digital Twin
DigDigital Twin is a virtual model of a process, a product or a service, in case of automotive – a digital cockpit of a car. This pattern helps to ensure the integrity of data and simplify the development of new systems by its abstraction over the vehicle. The concept is based on the fact that it stores the actual state of the vehicle in the cloud and constantly updates it based on data sent from a car. Every feature requiring some property of vehicle should be integrated with Digital Twin to limit direct integrations with a car and improve the execution time of operations.
Implementation of Digital Twin may be tricky though, as it all depends on the vehicle manufacturer and API it provides. Sometimes it doesn’t expose enough properties or doesn’t provide real-time updates. In such cases, it’s even impossible to implement this pattern.
Software for Connected Cars - Summary
We believe that the future will look more futuristic than we could have ever imagined. Autonomous cars, smart cars, smart homes, every device tries to make our lives easier. It’s not known when and how these solutions will fully utilize Artificial Intelligence to make this experience even better. Everything connects as numerous IoT devices are connected which provides us with unlimited possibilities.
T he automotive industry is currently transforming, and it isn’t only focusing on the driving experience anymore. There is a serious focus on connected mobility and other customer-oriented services to enhance our daily routines and habits. However, as software providers, we should keep in mind that automotive is a mature industry. The first connected car solutions were built years ago, and it’s challenging to integrate with them. These best practices should help focus on customer experience. Unreliable systems won’t encourage anyone to use it, and bad reviews can easily destroy a brilliant idea.
The automotive industry is experiencing a challenging transformation. We can notice these changes with every new model of a car and with every new service released. However, to keep up with the pace of the changing world, the industry needs modern technologies and reliable solutions, such as Kubernetes. And on top of that cloud-native application, software created with the best practices by experienced engineers who use the customer-first approach.
Interested in our services?
Reach out for tailored solutions and expert guidance.