Cloud development overview for non-cloud developers

Introduction
This article covers basic concepts of web applications that are designed to be run in Cloud environment and are intended for software engineers who are not familiar with Cloud Native development but work with other programming concepts/technologies. The article gives an overview of the basics from the perspective of concepts that are already known to non-cloud developers including mobile and desktop software engineers.
Basic concepts
Let’s start with something simple. Let’s imagine that we want to write a web application that allows users to create an account, order the products and write reviews on them. The simplest way is to have our backend app as a single app combining UI and code. Alternatively, we may split it frontend and into the backend, which just provides API.
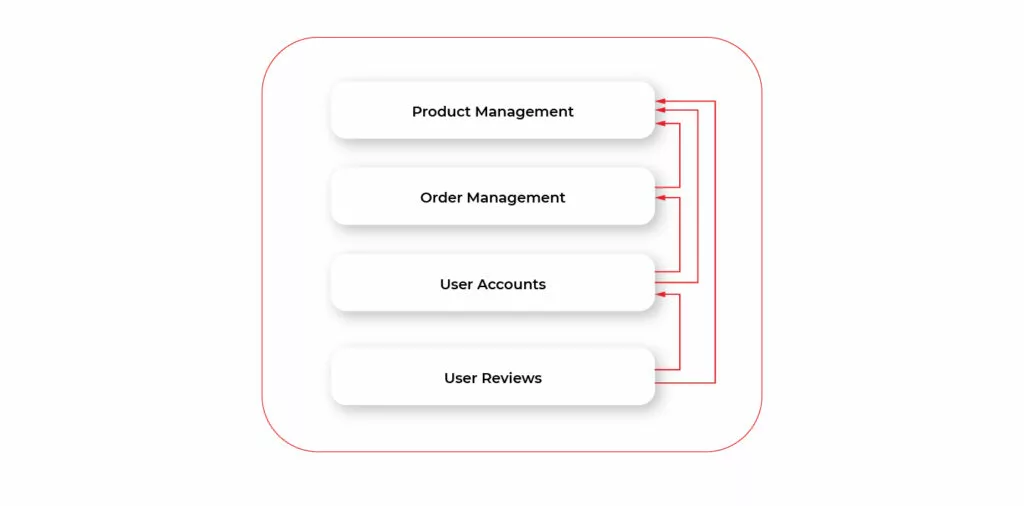
Let’s focus on the backend part. The whole communication between its components happens inside of a single app, on a code level. From the executable file perspective, our app is a monolithic piece of code: it’s a single file or package. Everything looks simple and clean: the code is split into several logical components, each component has its own layers. The possible overall architecture may look as follows:
But as we try to develop our app we'll quickly figure out that the above approach is not enough in the modern world and modern web environment. To understand what's wrong with the app architecture we need to figure out the key specificity of web apps compared to desktop or mobile apps. Let’s describe quite simple yet very important points. While being obvious to some (even non-web) developers the points are crucial for understanding essential flaws of our app while running in the modern server environment.
Desktop or mobile app runs on the user's device. This means that each user has their own app copy running independently. For web apps, we have the opposite situation. In a simplified way, in order to use our app user connects to a server and utilizes an app instance that runs on that server. So, for web apps, all users are using a single instance of the app. Well, in real-world examples it's not strictly a single instance in most cases because of scaling. But the key point here is that the number of users, in a particular moment of time is way greater than the number of app instances. In consequence, app error or crash has incomparably bigger user impact for web apps. I.e., when a desktop app crashes, only a single user is impacted. Moreover, since the app runs on their device they may just restart the app and continue using it. In case of a web app crash, thousands of users may be impacted. This brings us to two important requirements to consider.
- Reliability and testability
Since all the code is placed in a single (physical) app our changes to one component during development of the new features may impact any other existing app component. Hence, after implementing a single feature we have to retest the whole app. If we have some bug in our new code that leads to a crash, once the app crashes it becomes unavailable to all the users. Before we figure out the crash we have some downtime when users cannot use the app. Moreover to prevent further crashes we have to roll back to a previous app version. And if we delivered some fixes/updates along with the new feature we’ll lose those improvements. - Scalability
Consider the number of users is increased during a short period. In case of our example app, this may happen due to, e.g., discounts or new attractive products coming in. It quickly turns out that one app instance running is not enough. We have too many requests and app “times out” requests it cannot handle. We may just increase the number of running instances of the app. Hence, each instance will independently handle user orders. But after a closer look, it turns out that we actually don’t need to scale the whole app. The only part of the app that needs to handle more requests is creating and storing orders for a particular product. The rest of the app doesn’t need to be scaled. Scaling other components will result in unneeded memory growth. But since all the components are contained in a monolith (single binary) we can only scale all of them at once by launching new instances.
The other thing to consider is network latency which adds important limitations compared to mobile or desktop apps. Even though the UI layer itself runs directly in the browser (javascript), any heavy computation or CRUD operation requires http call. Since such network calls are relatively slow (compared to interactions between components in code) we should optimize the way we work with data and some server-side computations.
Let’s try to address the issues we described above.
Microservices
Let’s make a simple step and split our app into a set of smaller apps called microservices. The diagram below illustrates the general architecture of our app rethinks using microservices.
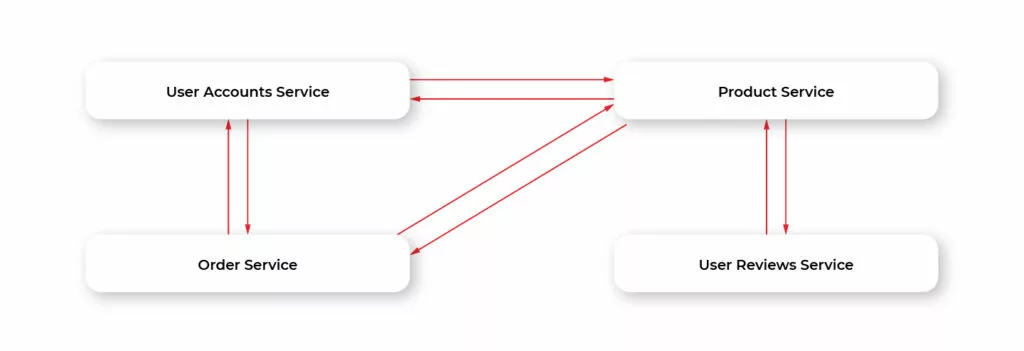
This helps us solve the problems of monolithic apps and has some additional advantages.
• Implementing a new feature (component) results in adding a new service or modifying the existing one. This reduces the complexity of the development and increases testability. If we have a critical bug we will simply disable that service while the other app parts will still work (excluding the parts that require interaction with the disabled service) and contain any other changes/fixes not related to the new feature.
• When we need to scale the app we may do it only for a particular component. E.g., if a number of purchases increase we may increment the number of running instances of Order Service without touching other ones.
• Developers in a team can work fully independently while developing separate microservices. We’re also not limited by a single language. Each microservice may be written in a different language.
• Deployment becomes easier. We may update and deploy each microservice independently. Moreover, we can use different server/cloud environments for different microservices. Each service can use its own third-party dependency services like a database or message broker.
Besides its advantages, microservice architecture brings additional complexity that is driven by the nature of microservice per se: instead of a single big app, we now have multiple small applications that have to communicate with each other through a network environment.
In terms of desktop apps, we may bring up here the example of inter-process communication, or IPC. Imagine that a desktop app is split into several smaller apps, running independently on our machine. Instead of calling methods of different app modules within a single binary we now have multiple binaries. We have to design a protocol of communication between them (e.g., based on OS native IPC API), we have to consider the performance of such communication, and so on. There may be several instances of a single app running at the same time on our machine. So, we should find out a way to determine the location of each app within the host OS.
The described specificity is very similar to what we have with microservices. But instead of running on a single machine microservice apps run in a network which adds even more complexity. On the other hand, we may use already existing solutions, like http for communicating between services (which is how microservices communicate in most cases) and RESTful API on top of it.
The key thing to understand here is that all the basic approaches described below are introduced mainly to solve the complexity resulting from splitting a single app into multiple microservices.
Locating microservices
Each microservice that calls API of another microservice (often called client service) should know its location. In terms of calling REST API using http the location consists of address and port. We can hardcode the location of the callee in the caller configuration files or code. But the problem is that can be instantiated, restarted, or moved independently of each other. So, hardcoding is not a solution as if the callee service location is changed the caller will have to be restarted or even recompiled. Instead, we may use Service Registry pattern.
To put it simply, Service Registry is a separate application that holds a table that maps a service id to its location. Each service is registered in Service Registry on startup and deregistered on shutdown. When client service needs to discover another service it gets the location of that service from the registry. So, in this model, each microservice doesn’t know the concrete location of its callee services but just their ids. Hence, if a certain service changes its location after restart the registry is updated and its client services will be able to get this new location.
Service discovery using a Service registry may be done in two ways.
1. Client-side service discovery. Service gets the location of other services by directly querying the registry. Then calls discovered the service’s API by sending a request to that location. In this case, each service should know the location of the Service Registry. Thus, its address and port should be fixed.
2. Server-side service discovery. Service may send API call requests along with service id to a special service called Router. Router retrieves the actual location of the target service and forwards the request to it. In this case, each service should know the location of the Router.
Communicating with microservices
So, our application consists of microservices that communicate. Each has its own API. The client of our microservices (e.g., frontend or mobile app) should use that API. But such usage becomes complicated even for several microservices. Another example, in terms of desktop interprocess communication, imagines a set of service apps/daemons that manage the file system. Some may run constantly in the background, some may be launched when needed. Instead of knowing details related to each service, e.g., functionality/interface, the purpose of each service, whether or not it runs, we may use a single facade daemon, that will have a consistent interface for file system management and will internally know which service to call.
Referring back to our example with the e-shop app consider a mobile app that wants to use its API. We have 5 microservices, each has its own location. Remember also, that the location can be changed dynamically. So, our app will have to figure out to which services particular
requests should be sent. Moreover, the dynamically changing location makes it almost impossible to have a reliable way for our client mobile app to determine the address and port of each service.
The solution is similar to our previous example with IPC on the desktop. We may deploy one service at a fixed known location, that will accept all the requests from clients and forward each request to the appropriate microservice. Such a pattern is called API Gateway.
Below is the diagram demonstrating how our example microservices may look like using Gateway:
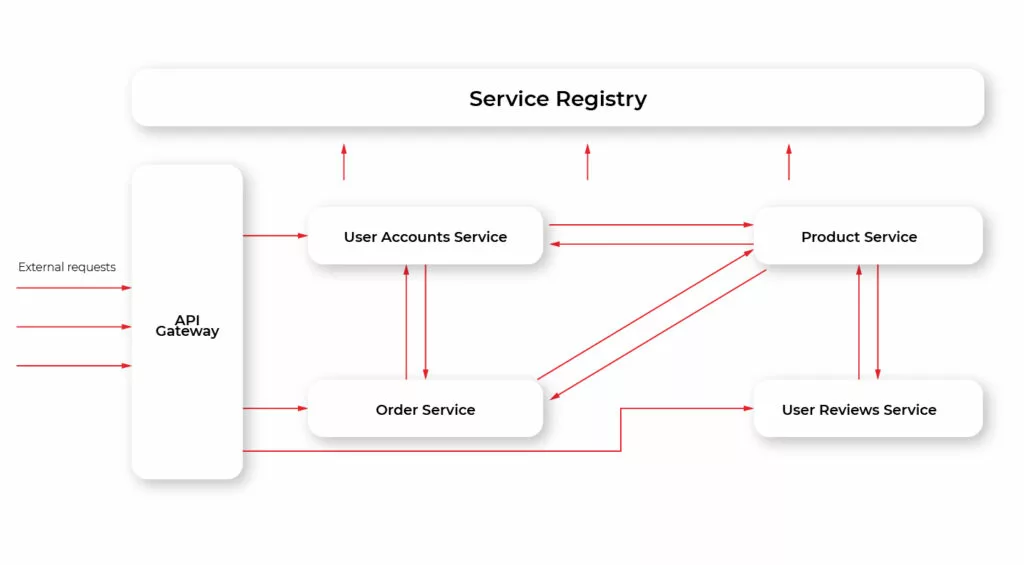
Additionally, this approach allows unifying communication protocol. That is, different services may use different protocols. E.g., some may use REST, some AMQP, and so on. With API Gateway these details are hidden from the client: the client just queries the Gateway using a single protocol (usually, but not necessarily REST) and then the Gateway translates those requests into the appropriate protocol a particular microservice uses.
Configuring microservices
When developing a desktop or mobile app we have several devices the app should run on during its lifecycle. First, it runs on the local device (either computer or mobile device/simulator in case of mobile app) of the developers who work on the app. Then it’s usually run on some dev device to perform unit tests as part of CI/CD. After that, it’s installed on a test device/machine for either manual or automated testing. Finally, after the app is released it is installed on users’ machines/devices. Each type of device
(local, dev, test, user) implies its own environment. For instance, a local app usually uses dev backend API that is connected to dev database. In the case of mobile apps, you may even develop using a simulator, that has its own specifics, like lack or limitation of certain system API. The backend for the app’s test environment has DB with a configuration that is very close to the one used for the release app. So, each environment requires a separate configuration for the app, e.g., server address, simulator specific settings, etc. With a microservices-based web app, we have a similar situation. Our microservices usually run in different environments. Typically they are dev, test, staging, and production. Hardcoding configuration is no option for our microservices, as we typically move the same app package from one environment to another without rebuilding it. So, it’s natural to have the configuration external to the app. At a minimum, we may specify a configuration set per each environment inside the app. While such an approach is good for desktop/mobile apps it has provides a limitation for a web app. We typically move the same app package/file from one environment to another without recompiling it. A better approach is to externalize our configuration. We may store configuration data in database or external files that are available to our microservices. Each microservice reads its configuration on startup. The additional benefit of such an approach is that when the configuration is updated the app may read it on the fly, without the need for rebuilding and/or redeploying it.
Choosing cloud environment
We have our app developed with a microservices approach. The important thing to consider is where would we run our microservices. We should choose the environment that allows us to take advantage of microservice architecture. For cloud solutions, there are two basic types of environment: Infrastructure as a Service, or IaaS, and Platform as a Service, or PaaS. Both have ready-to-use solutions and features that allow scalability, maintainability, reliability which require much effort to achieve on on-premises. and Each of them has advantages compared to traditional on-premises servers.
Summary
In this article, we’ve described key features of microservices architecture for the cloud-native environment. The advantages of microservices are:
- app scalability;
- reliability;
- faster and easier development
- better testability.
To fully take advantage of microservice architecture we should use IaaS or PasS cloud environment type.

Grape Up guides enterprises on their data-driven transformation journey
Ready to ship? Let's talk.
Check related articles
Read our blog and stay informed about the industry's latest trends and solutions.
How to manage an M5Stack Core2 for AWS. Part 3 – best of Micropython and C meld together
In the first part of the article , we’ve covered Micropython usage with UiFlow and VS Code environments. In the second one , we use C/C++ with more granular device control. This time, we’ll try to run Micropython with an external library added.
Micropython with interactive console
There are two projects that enable Micropython for ESP32 to run external libraries. The first one is M5Stack-official https://github.com/m5stack/Core2forAWS-MicroPython , and the second one is unofficial https://github.com/mocleiri/tensorflow-micropython-examples . The common part is – you can run an interactive Micropython console on the controller using the serial port. Unfortunately, this is the only way to go. There is no IDE and you can’t upload a complex, multi-file application.
To open the console, you can simply use Putty and connect to the proper COM port (COM3, in my case) with 115200 speed.
To run the first project, the best way is to follow the official README documentation, but there is a bug in the code here:
https://github.com/m5stack/Core2forAWS-MicroPython/blob/master/ports/esp32/makelfs2.py#L20 .
One file is opened in ‘w’ (write) mode and another in ‘rb’ (read bytes). You need to change ‘w’ to ‘wb’ to run any example from the readme. It’s a good codebase because it’s small and M5Stack official. It contains upip, so you can include more official libraries after connecting to the Internet. You can also extend the codebase with more libraries before the build (some extra libraries are available in another official repository https://github.com/m5stack/micropython-lib ). However, TensorFlow is a complex library with multiple dependencies, so using the unofficial project is easier.
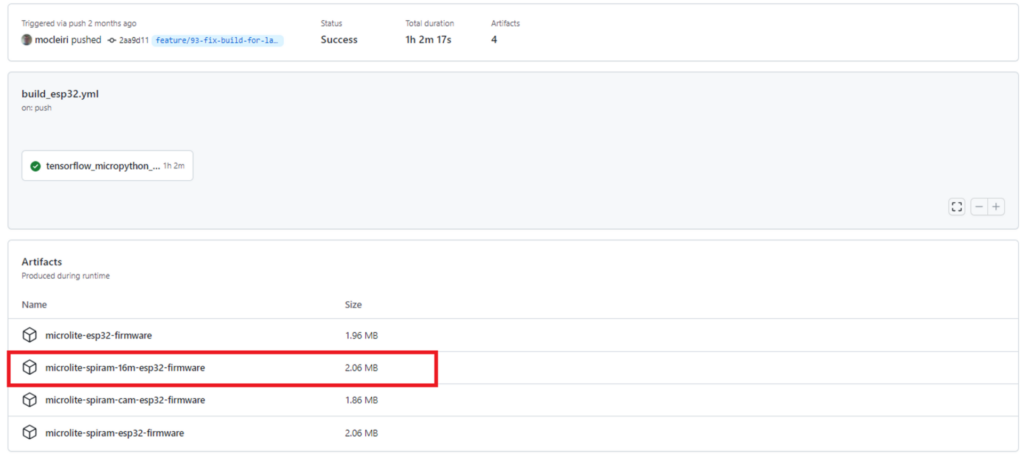
The Tensorflow Micropython Examples project offers pre-built images to download directly from GitHub. For our controller, you need the ESP32 version (no ESP32 S3) for 16MB memory.
Just open the GitHub Actions page https://github.com/mocleiri/tensorflow-micropython-examples/actions/workflows/build_esp32.yml , pick the newest green build and download the latest version.
Then extract the zip package and burn it using command ‘esptool.py -p /dev/ttyUSB0 -b 460800 –before default_reset –after hard_reset –chip esp32 write_flash –flash_mode dio –flash_size detect –flash_freq 40m 0x1000 bootloader/bootloader.bin 0x8000 partition_table/partition-table.bin 0x10000 micropython.bin’ . Ensure you have passed the USB port to WSL using usbip and allowed all users to use it with chmod (see the first part for details).
With this project, you can import the microlite library, which is exactly the one you need - TensorFlow Lite for Microcontrollers. If you want to extend this project with your own libraries, you can add those to the cloned source code and build it with the following commands:
git submodule init
git submodule update --recursive
cd micropython
git submodule update --init lib/axtls
git submodule update --init lib/berkeley-db-1.xx
cd ..
source ./micropython/tools/ci.sh && ci_esp32_setup_helper v4.3.1
source ./esp-idf/export.sh #as you can see, esp-idf is already included
pip3 install Pillow
pip3 install Wave
rm -rf ./micropython-modules/microlite/tflm
cd ./tensorflow
../micropython-modules/microlite/prepare-tflm-esp.sh
cd ../micropython
make -C mpy-cross V=1 clean all
cd ../boards/esp32/MICROLITE_SPIRAM_16M
rm -rf build
idf.py clean build
Your binaries are located under the boards/esp32/MICROLITE_SPIRAM_16M/build directory.
This way, you can add more libraries or your own program to the image, but you still need to use the interactive console to run it.
Summary
This three-part workshop aimed to utilize M5Stack Core2 for AWS controller with AWS IoT connection and ML included. Let’s try to sum up all possible ways to do that.
Language Management method Pros Cons Micropython UiFlow Python Low learning curve/easy UI OTA updates No Tensorflow available Not adequate for complex use cases VS Code with vscode-m5stack-mpi plugin Python Full IDE (Visual Studio Code) No Tensorflow available Tensorflow Micropython Examples Micropython with TensorFlow Lite for Microcontrollers Capability to build the project with more libraries or custom code included Necessity to run the code from interactive Python console. C/C++ VS Code with PlatformIO and FreeRTOS All libraries available Complex code (C/C++) Complex configuration Arduino IDE All libraries available Easy and powerful enough IDE Arduino control loop limitation ESP-IDF Small solution, without even a dedicated IDE (plugins for CS Code or Eclipse available) Complex dependency Management
As you can see, we’ve tried various approaches and discovered their advantages and disadvantages. Now, you can decide if you wish to have complete control and use pure C/C++, or maybe you prefer much more friendly Python. You can choose which IDE or at least plugin you’d like to use, and whether you want to utilize OTA to update an entire firmware or only to transfer data between your devices and the cloud.
Accelerating data projects with parallel computing
Inspired by Petabyte Scale Solutions from CERN
The Large Hadron Collider (LHC) accelerator is the biggest device humankind has ever created. Handling enormous amounts of data it produces has required one of the biggest computational infrastructures on the earth. However, it is quite easy to overwhelm even the best supercomputer with inefficient algorithms that do not correctly utilize the full power of underlying, highly parallel hardware. In this article, I want to share insights born from my meeting with the CERN people, particularly how to validate and improve parallel computing in the data-driven world.
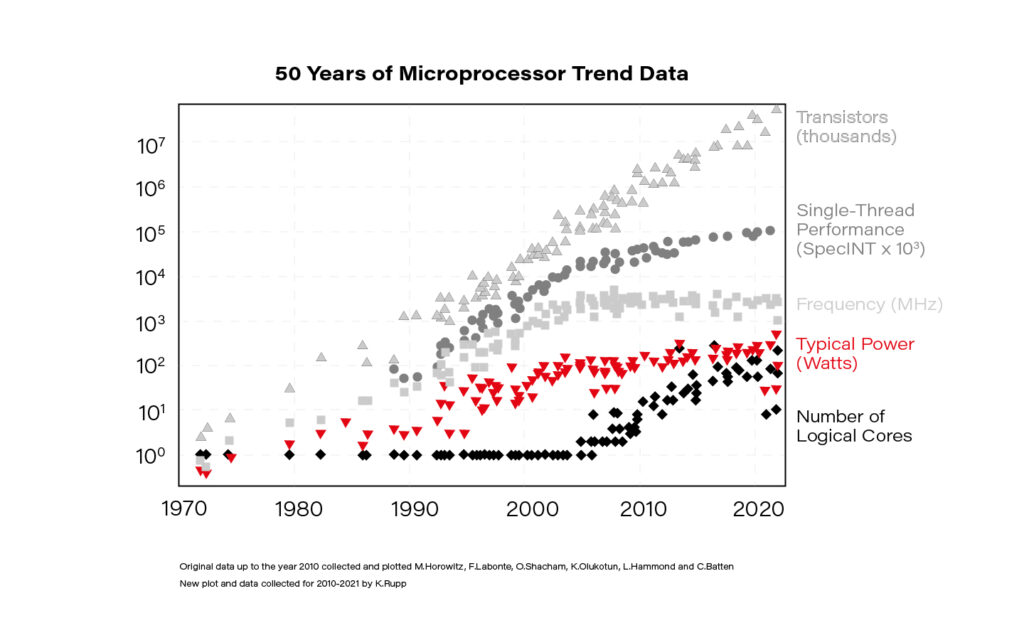
Struggling with data on the scale of megabytes (10 6 ) to gigabytes (10 9 ) is the bread and butter for data engineers, data scientists, or machine learning engineers. Moving forward, the terabyte (10 12 ) and petabyte (10 15 ) scale is becoming increasingly ordinary, and the chances of dealing with it in everyday data-related tasks keep growing. Although the claim "Moore's law is dead!" is quite a controversial one, the fact is that single-thread performance improvement has slowed down significantly since 2005. This is primarily due to the inability to increase the clock frequency indefinitely. The solution is parallelization - mainly by an increase in the numbers of logical cores available for one processing unit.
Knowing it, the ability to properly parallelize computations is increasingly important.
In a data-driven world, we have a lot of ready-to-use, very good solutions that do most of the parallel stuff on all possible levels for us and expose easy-to-use API. For example, on a large scale, Spark or Metaflow are excellent tools for distributed computing; at the other end, NumPy enables Python users to do very efficient matrix operations on the CPU, something Python is not good at all, by integrating C, C++, and Fortran code with friendly snake_case API. Do you think it is worth learning how it is done behind the scenes if you have packages that do all this for you? I honestly believe this knowledge can only help you use these tools more effectively and will allow you to work much faster and better in an unknown environment.
The LHC lies in a tunnel 27 kilometers (about 16.78 mi) in circumference, 175 meters (about 574.15 ft) under a small city built for that purpose on the France–Switzerland border. It has four main particle detectors that collect enormous amounts of data: ALICE, ATLAS, LHCb, and CMS. The LHCb detector alone collects about 40 TB of raw data every second. Many data points come in the form of images since LHCb takes 41 megapixels resolution photos every 25 ns. Such a huge amount of data must be somehow compressed and filtered before permanent storage. From the initial 40 TB/s, only 10G GB/s are saved on disk – the compression ratio is 1:4000!
It was a surprise for me that about 90% of CPU usage in LHCb is done on simulation. One may wonder why they simulate the detector. One of the reasons is that a particle detector is a complicated machine, and scientists at CERN use, i.e., Monte Carlo methods to understand the detector and the biases. Monte Carlo methods can be suitable for massively parallel computing in physics.

Let us skip all the sophisticated techniques and algorithms used at CERN and focus on such aspects of parallel computing, which are common regardless of the problem being solved. Let us divide the topic into four primary areas:
- SIMD,
- multitasking and multiprocessing,
- GPGPU,
- and distributed computing.
The following sections will cover each of them in detail.
SIMD
The acronym SIMD stands for Single Instruction Multiple Data and is a type of parallel processing in Flynn's taxonomy .
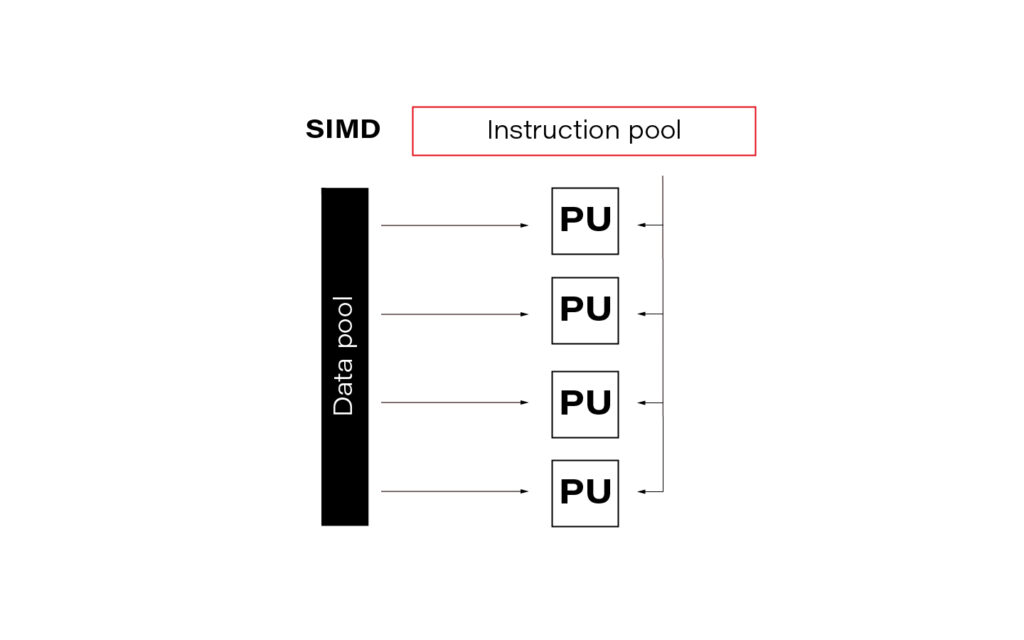
In the data science world, this term is often so-called vectorization. In practice, it means simultaneously performing the same operation on multiple data points (usually represented as a matrix). Modern CPUs and GPGPUs often have dedicated instruction sets for SIMD; examples are SSE and MMX. SIMD vector size has significantly increased over time.
Publishers of the SIMD instruction sets often create language extensions (typically using C/C++) with intrinsic functions or special datatypes that guarantee vector code generation. A step further is abstracting them into a universal interface, e.g., std::experimental::simd from C++ standard library. LLVM's (Low Level Virtual Machine) libcxx implements it (at least partially), allowing languages based on LLVM (e.g., Julia, Rust) to use IR (Intermediate Representation – code language used internally for LLVM's purposes) code for implicit or explicit vectorization. For example, in Julia, you can, if you are determined enough, access LLVM IR using macro @code_llvm and check your code for potential automatic vectorization.
In general, there are two main ways to apply vectorization to the program:
- auto-vectorization handled by compilers,
- and rewriting algorithms and data structures.
For a dev team at CERN, the second option turned out to be better since auto-vectorization did not work as expected for them. One of the CERN software engineers claimed that "vectorization is a killer for the performance." They put a lot of effort into it, and it was worth it. It is worth noting here that in data teams at CERN, Python is the language of choice, while C++ is preferred for any performance-sensitive task.
How to maximize the advantages of SIMD in everyday practice? Difficult to answer; it depends, as always. Generally, the best approach is to be aware of this effect every time you run heavy computation. In modern languages like Julia or best compilers like GCC, in many cases, you can rely on auto-vectorization. In Python, the best bet is the second option, using dedicated libraries like NumPy. Here you can find some examples of how to do it.
Below you can find a simple benchmarking presenting clearly that vectorization is worth attention.
import numpy as np
from timeit import Timer
# Using numpy to create a large array of size 10**6
array = np.random.randint(1000, size=10**6)
# method that adds elements using for loop
def add_forloop():
new_array = [element + 1 for element in array]
# Method that adds elements using SIMD
def add_vectorized():
new_array = array + 1
# Computing execution time
computation_time_forloop = Timer(add_forloop).timeit(1)
computation_time_vectorized = Timer(add_vectorized).timeit(1)
# Printing results
print(execution_time_forloop) # gives 0.001202600
print(execution_time_vectorized) # gives 0.000236700
Multitasking and Multiprocessing
Let us start with two confusing yet important terms which are common sources of misunderstanding:
- concurrency: one CPU, many tasks,
- parallelism: many CPUs, one task.
Multitasking is about executing multiple tasks concurrently at the same time on one CPU. A scheduler is a mechanism that decides what the CPU should focus on at each moment, giving the impression that multiple tasks are happening simultaneously. Schedulers can work in two modes:
- preemptive,
- and cooperative.
A preemptive scheduler can halt, run, and resume the execution of a task. This happens without the knowledge or agreement of the task being controlled.
On the other hand, a cooperative scheduler lets the running process decide when the processes voluntarily yield control or when idle or blocked, allowing multiple applications to execute simultaneously.
Switching context in cooperative multitasking can be cheap because parts of the context may remain on the stack and be stored on the higher levels in the memory hierarchy (e.g., L3 cache). Additionally, code can stay close to the CPU for as long as it needs without interruption.
On the other hand, the preemptive model is good when a controlled task behaves poorly and needs to be controlled externally. This may be especially useful when working with external libraries which are out of your control.
Multiprocessing is the use of two or more CPUs within a single Computer system. It is of two types:
- Asymmetric - not all the processes are treated equally; only a master processor runs the tasks of the operating system.
- Symmetric - two or more processes are connected to a single, shared memory and have full access to all input and output devices.
I guess that symmetric multiprocessing is what many people intuitively understand as typical parallelism.
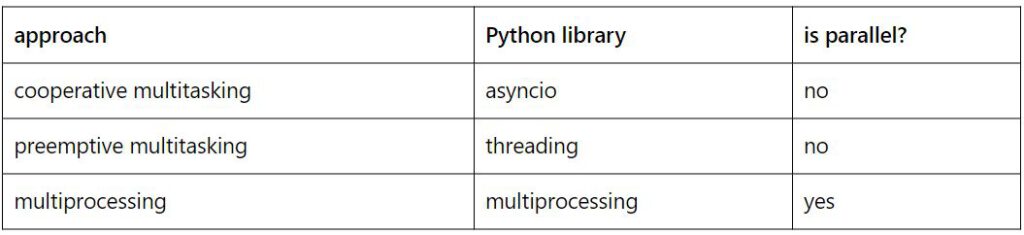
Below are some examples of how to do simple tasks using cooperative multitasking, preemptive multitasking, and multiprocessing in Python. The table below shows which library should be used for each purpose.
- Cooperative multitasking example:
import asyncio
import sys
import time
# Define printing loop
async def print_time():
while True:
print(f"hello again [{time.ctime()}]")
await asyncio.sleep(5)
# Define stdin reader
def echo_input():
print(input().upper())
# Main function with event loop
async def main():
asyncio.get_event_loop().add_reader(
sys.stdin,
echo_input
)
await print_time()
# Entry point
asyncio.run(main())
Just type something and admire the uppercase response.
- Preemptive multitasking example:
import threading
import time
# Define printing loop
def print_time():
while True:
print(f"hello again [{time.ctime()}]")
time.sleep(5)
# Define stdin reader
def echo_input():
while True:
message = input()
print(message.upper())
# Spawn threads
threading.Thread(target=print_time).start()
threading.Thread(target=echo_input).start()
The usage is the same as in the example above. However, the program may be less predictable due to the preemptive nature of the scheduler.
- Multiprocessing example:
import time
import sys
from multiprocessing import Process
# Define printing loop
def print_time():
while True:
print(f"hello again [{time.ctime()}]")
time.sleep(5)
# Define stdin reader
def echo_input():
sys.stdin = open(0)
while True:
message = input()
print(message.upper())
# Spawn processes
Process(target=print_time).start()
Process(target=echo_input).start()
Notice that we must open stdin for the echo_input process because this is an exclusive resource and needs to be locked.
In Python, it may be tempting to use multiprocessing anytime you need accelerated computations. But processes cannot share resources while threads / asyncs can. This is because a process works with many CPUs (with separate contexts) while threads / asyncs are stuck to one CPU. So, you must use synchronization primitives (e.g., mutexes or atomics), which complicates source code. No clear winner here; only trade-offs to consider.
Although that is a complex topic, I will not cover it in detail as it is uncommon for data projects to work with them directly. Usually, external libraries for data manipulation and data modeling encapsulate the appropriate code. However, I believe that being aware of these topics in contemporary software is particularly useful knowledge that can significantly accelerate your code in unconventional situations.
You may find other meanings of the terminology used here. After all, it is not so important what you call it but rather how to choose the right solution for the problem you are solving.
GPGPU
General-purpose computing on graphics processing units (GPGPU) utilizes shaders to perform massive parallel computations in applications traditionally handled by the central processing unit.
In 2006 Nvidia invented Compute Unified Device Architecture (CUDA) which soon dominated the machine learning models acceleration niche. CUDA is a computing platform and offers API that gives you direct access to parallel computation elements of GPU through the execution of computer kernels.
Returning to the LHCb detector, raw data is initially processed directly on CPUs operating on detectors to reduce network load. But the whole event may be processed on GPU if the CPU is busy. So, GPUs appear early in the data processing chain.
GPGPU's importance for data modeling and processing at CERN is still growing. The most popular machine learning models they use are decision trees (boosted or not, sometimes ensembled). Since deep learning models are harder to use, they are less popular at CERN, but their importance is still rising. However, I am quite sure that scientists worldwide who work with CERN's data use the full spectrum of machine learning models.
To accelerate machine learning training and prediction with GPGPU and CUDA, you need to create a computing kernel or leave that task to the libraries' creators and use simple API instead. The choice, as always, depends on what goals you want to achieve.
For a typical machine learning task, you can use any machine learning framework that supports GPU acceleration; examples are TensorFlow, PyTorch, or cuML , whose API mirrors Sklearn's. Before you start accelerating your algorithms, ensure that the latest GPU driver and CUDA driver are installed on your computer and that the framework of choice is installed with an appropriate flag for GPU support. Once the initial setup is done, you may need to run some code snippet that switches computation from CPU (typically default) to GPU. For instance, in the case of PyTorch, it may look like that:
import torch
torch.cuda.is_available()
def get_default_device():
if torch.cuda.is_available():
return torch.device('cuda')
else:
return torch.device('cpu')
device = get_default_device()
device
Depending on the framework, at this point, you can process as always with your model or not. Some frameworks may require, e. g. explicit transfer of the model to the GPU-specific version. In PyTorch, you can do it with the following code:
net = MobileNetV3()
net = net.cuda()
At this point, we usually should be able to run .fit(), .predict(), .eval(), or something similar. Looks simple, doesn't it?
Writing a computing kernel is much more challenging. However, there is nothing special about computing kernel in this context, just a function that runs on GPU.
Let's switch to Julia; it is a perfect language for learning GPU computing. You can get familiar with why I prefer Julia for some machine learning projects here . Check this article if you need a brief introduction to the Julia programming language.
Data structures used must have an appropriate layout to enable performance boost. Computers love linear structures like vectors and matrices and hate pointers, e. g. in linked lists. So, the very first step to talking to your GPU is to present a data structure that it loves.
using Cuda
# Data structures for CPU
N = 2^20
x = fill(1.0f0, N) # a vector filled with 1.0
y = fill(2.0f0, N) # a vector filled with 2.0
# CPU parallel adder
function parallel_add!(y, x)
Threads.@threads for i in eachindex(y, x)
@inbounds y[i] += x[i]
end
return nothing
end
# Data structures for GPU
x_d = CUDA.fill(1.0f0, N)
# a vector stored on the GPU filled with 1.0
y_d = CUDA.fill(2.0f0, N)
# a vector stored on the GPU filled with 2.0
# GPU parallel adder
function gpu_add!(y, x)
CUDA.@sync y .+= x
return
end
GPU code in this example is about 4x faster than the parallel CPU version. Look how simple it is in Julia! To be honest, it is a kernel imitation on a very high level; a more real-life example may look like this:
function gpu_add_kernel!(y, x)
index = (blockIdx().x - 1) * blockDim().x + threadIdx().x
stride = gridDim().x * blockDim().x
for i = index:stride:length(y)
@inbounds y[i] += x[i]
end
return
end
The CUDA analogs of threadid and nthreads are called threadIdx and blockDim. GPUs run a limited number of threads on each streaming multiprocessor (SM). The recent NVIDIA RTX 6000 Ada Generation should have 18,176 CUDA Cores (streaming processors). Imagine how fast it can be even compared to one of the best CPUs for multithreading AMD EPYC 7773X (128 independent threads). By the way, 768MB L3 cache (3D V-Cache Technology) is amazing.
Distributed Computing
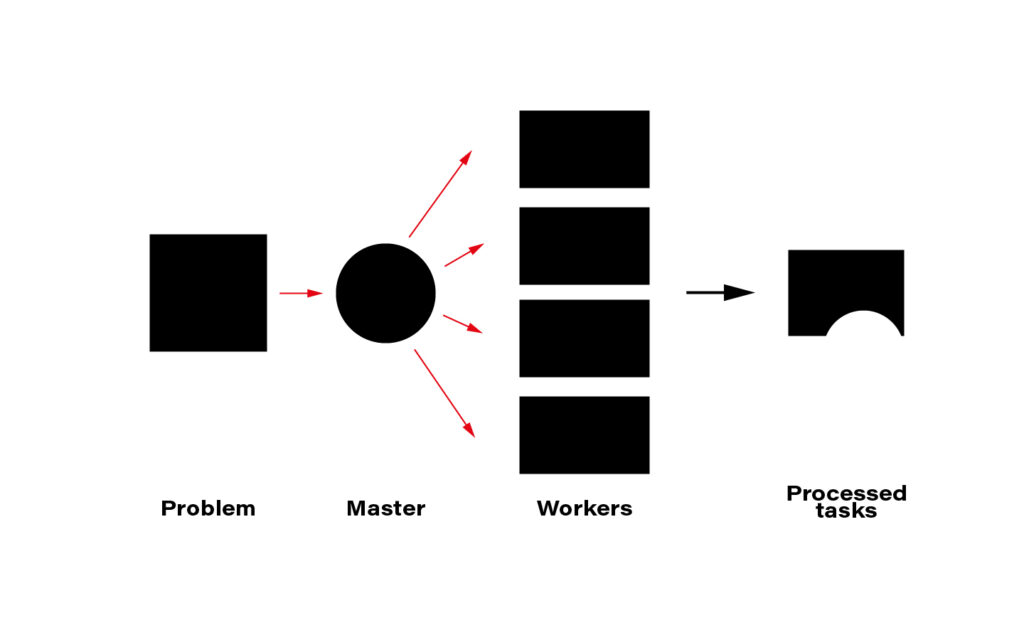
The term distributed computing, in simple words, means the interaction of computers in a network to achieve a common goal. The network elements communicate with each other by passing messages (welcome back cooperative multitasking). Since every node in a network usually is at least a standalone virtual machine, often separate hardware, computing may happen simultaneously. A master node can split the workload into independent pieces, send them to the workers, let them do their job, and concatenate the resulting pieces into the eventual answer.
The computer case is the symbolic border line between the methods presented above and distributed computing. The latter must rely on a network infrastructure to send messages between nodes, which is also a bottleneck. CERN uses thousands of kilometers of optical fiber to create a huge and super-fast network for that purpose. CERN's data center offers about 300,000 physical and hyper-threaded cores in a bare-metal-as-a-service model running on about seventeen thousand servers. A perfect environment for distributed computing.
Moreover, since most data CERN produces is public, LHC experiments are completely international - 1400 scientists, 86 universities, and 18 countries – they all create a computing and storage grid worldwide. That enables scientists and companies to run distributed computing in many ways.

Although this is important, I will not cover technologies and distributed computing methods here. The topic is huge and very well covered on the internet. An excellent framework recommended and used by one of the CERN scientists is Spark + Scala interface. You can solve almost every data-related task using Spark and execute the code in a cluster that distributes computation on nodes for you.
Ok, the only piece of advice: be aware of how much data you send to the cluster - transferring big data can ruin all the profit from distributing the calculations and cost you a lot of money.
Another excellent tool for distributed computation on the cloud is Metaflow. I wrote two articles about Metaflow: introduction and how to run a simple project . I encourage you to read and try it.
Conclusions
CERN researchers have convinced me that wise parallelization is crucial to achieving complex goals in the contemporary Big Data world. I hope I managed to infect you with this belief. Happy coding!
Interested in our services?
Reach out for tailored solutions and expert guidance.